


0 前言
隨著科學技術的發展,無人機、無人坦克和無人潛艇等各種無人駕駛武器系統開始出現在戰場上,其作戰任務也從深入敵后進行偵查發展到發射導彈炸彈直接進行攻擊。與其他武器系統相比,這些武器系統具有自己的特點,如需要實時傳送高清視頻信號,需要對其進行遠程操作控制。傳送回來的高清視頻圖像一方面作為偵查的結果提供給有關作戰人員使用,另一方面作為遙控人員操作控制的依據。
這兩個特點,正好涉及到控制中心顯示控制系統的工作,本文從顯示控制系統的角度提出并研究用于無人駕駛系統(以下簡稱無人系統)的顯示控制群自組織問題。
1 問題的起因
從一個簡單的例子談起:設有N (N>2)個無人機系統對某一地區進行掃描偵察,在任務規劃時,可以規劃出一個執行任務的最佳方案,例如覆蓋更大的區域,避免活動目標被遺漏等[1]。在執行任務時,如果其中一架無人機被擊落,剩余的無人機的行動就需要進行調整,執行新的方案。被擊落的無人機位置不同,調整的方案可能就不同,應對的行動變化也就不同。如果又有一架無人機被擊落,剩余的無人機的行動需要再次調整。現在如果有新的無人機發射升空,又需要調整各個無人機的行動方案。
這實際上就是需要N個無人機組成的系統群在執行任務時能夠自動組織起來,相互配合,調整各自的行動,適應變化的環境,隨時形成優化的方案,以達到更好的執行效果。不僅是無人系統群構成變化、環境變化,如果任務發生變化,這個無人機組成的系統群也要及時相應地做出改變。事實上,在控制中心顯示控制系統建設中,已經遇到類似的問題。在控制中心有數千臺設備在工作。為了完成某些任務、在實現某些功能時,通常需要許多不同類型的設備協調動作。不僅在控制中心內,控制中心之間也有設備協調控制問題。為了解決顯示控制系統的控制問題,采用數學中群論的方法,形成了顯示控制群的自組織方法。這個方法可以應用于N個無人系統組成系統的自組織、自適應問題。
一般地,當有N個設備(可以是無人系統,也可能是不同種類、不同功能、不同型號的設備)需要協調工作、完成多目標任務時,根據顯示控制群論的方法,需要進行如下工作。
(1)設備的形式化:通過定義虛擬設備的概念,使控制系統能夠統一地組織、控制各種各樣不同種類、不同功能、不同性能、不同操作動作和不同狀態表示的顯控系統中的設備(或武器系統)。
(2)組成顯示控制群:虛擬設備組成被稱為顯示控制群(簡稱顯控群)的系統。從而形成把對全域的虛擬設備協調統一控制分為多層次的對各子顯控群的控制,通過對子顯控群的控制實現對全域設備的控制,而且這種控制可以分布式通過虛實設備轉換實現。
(3)設備的形式接口:包括(a)提供一個命令集,用于接受顯控群發來的命令。通過執行這些命令,設備(或武器系統)能進行顯控群所需的全部操作,實現其功能。(b)提供一個狀態集,用于向顯控群報告設備(或武器系統)的狀態,使顯控群能了解它對命令的執行情況,對功能的實現情況。
(4)顯控群的自組織:虛擬設備命令集中的命令在執行時對先后順序的要求形成了一種時間的前提關系,可以用于自動形成命令的執行序列和并發執行。命令集在執行時對設備的需求形成了一種空間的前提關系,可以用于自動組織起一組設備的空間組合。通過虛擬命令,顯控群可以自動組織起一個實現某種功能的子顯控群。而一個顯控群最大的子群就是它自身,即顯控群可以實現自組織。
(5)顯控群的自適應:一個顯控群,不論把它斷成幾段,每一段都還是顯控群,會重構適應改變了的情況,完成預定任務;如果重新連接,又會自動恢復成一個顯控群。這就是建設打不垮的指揮控制系統的一個重要理論基礎。
(6)演化硬件方法用于自組織:演化硬件是指一種能動態自主重新配置自身結構的硬件,一種具有在線適應性的硬件。顯控群采用這種方法,實現在遺傳算法控制下的可優化的自組織,使顯控群能夠通過對環境的感知和與環境的交互來動態適應變化的環境。
2系統的控制結構
當把顯示控制理論用于無人系統的自組織時,首先要討論系統群的控制結構。可以有三種形式的控制結構。
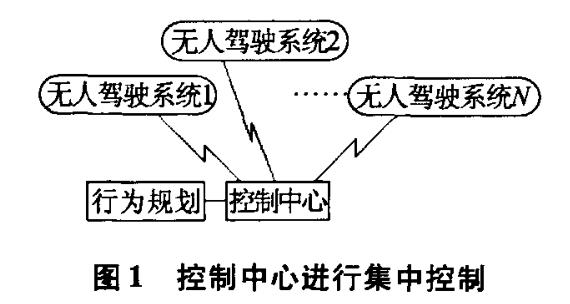
(1)通過控制中心,進行集中規劃、集中控制如圖1所示。這是傳統的直接由控制中心實施控制的方式。
(2)沒有固定的控制中心,而是由各無人系統分布式輪流擔任控制中心,進行集中規劃、集中控制如圖2所示。這是一種令牌環控制方式。由獲得控制權的無人系統成為控制中心,并實施控制。經過一段時間,把控制權轉交給下一個無人系統,使之成為控制中心進行控制。只要把任務注入系統,這些無人駕駛系統就自動組織起來,始終存在一個控制中心,組織各系統完成任務。如果擔任控制中心的無人駕駛系統被擊毀,剩余的系統會由于超時而產生新的控制中心,繼續進行工作。如果某一作為控制中心的系統發現有其他控制中心存在,就比較系統編號,編號小的自動停止運行。這就保證了只有一個控制中心在工作。
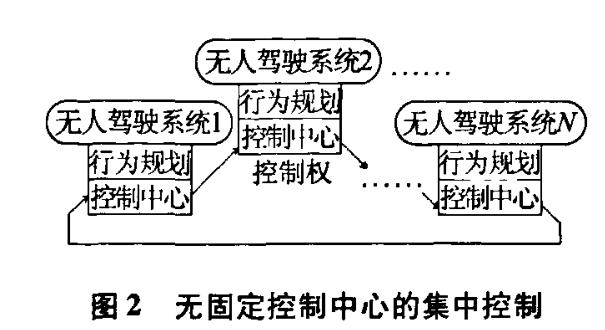
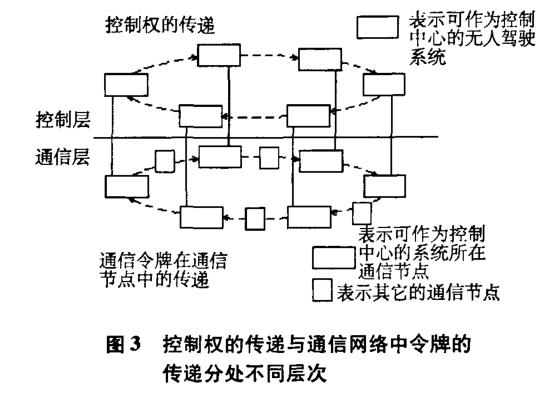
圖2只是表示了控制權的輪循,實際還有各無人系統之間的通信問題,也可采用無線令牌的方式,此時會形成兩層令牌的傳遞如圖3所示。圖中底層是通信網絡的令牌在傳遞,上層是控制權的傳遞,各自傳遞各自的,互不影響。這說明控制權的傳遞與通信網絡中令牌的傳遞不是一回事。通信網絡中令牌的傳遞要比控制權的傳遞快得多,且傳遞的方向也可能不同。
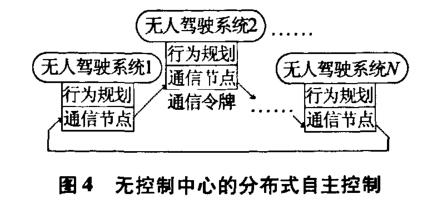
(3)沒有控制中心,各設備(或武器系統)分布式規劃行動,進行民主集中式的行動方案選擇,實現分布式的控制如圖4所示。此時雖然沒有控制中心,但還需要各無人系統之間的通信,例如可采用無線令牌方式進行通信。
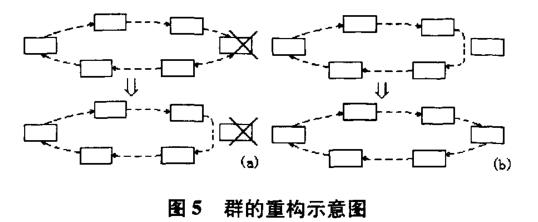
控制結構(1)和(2)的區別是一個有固定的控制中心,另一個是由無人系統輪流擔任控制中心,其控制方法基本相同。顯然,系統進行自重構、自組織是指控制結構(2)和(3)這兩種控制形式。在這兩種情況下,當某一無人系統被毀,剩余的無人系統能自動重新組成群如圖5(a)所示。反之,如果有新的無人系統加入,也能進行重構如圖5(b) 所示。這種重構能力是令牌傳遞方式所支持的,新加入的無人系統可根據編號順序自動加入群。
三種結構雖有不同,但控制方法是相同的,即根據各系統的當前狀態,找出群下一步的行動方案,使各系統協調動作。控制結構(1)和(2)都是由控制中心計算出群的行動方案,然后注入其他無人系統,使其執行。控制結構(3)是由各無人系統各自計算出群的行動方案,然后對這些方案進行一次方案評價分數的排序,分別都取得分最高的方案來行動,得分相同的按無人系統的編號排序。于是各無人系統雖然分別計算,卻都取到同一個方案,因此稱為民主集中式的方案選擇與控制。
3 自組織的控制方法
根據顯示控制群論的方法,各種設備、各個無人駕駛系統,都可以形式地表示為接收命令、返回狀態的虛擬設備,c是此設備接受命令的集合,s是這個設備狀態的集合。
由N個設備組成的系統,可以定義為一個顯示控制群(簡稱顯控群)。這個群可以根據要完成的任務,自行組織虛擬設備工作,并且在情況發生變化時重新組織設備。
設有N個無人系統作為N個個體,也可視為N個虛擬設備。每個個體有自己的當前狀態,有行動的可選方案如圖6所示。這就構成了一個群的行動方案空間,于是確定各無人系統下一步的行動,就成為在此空間的一種搜索。
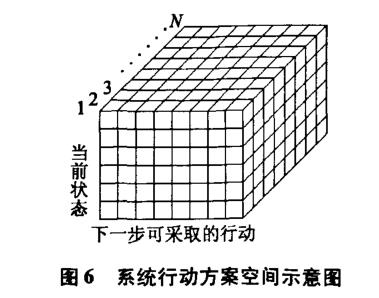

于是采用遺傳算法在方案空間中進行搜索,形成系統群的下一步行動方案。這是顯示控制群自組織的演化硬件方法的一種應用。當無人系統;(1≤i≤N)被擊毀,空間中該系統的狀態不再有效,作為系統群將重新在方案空間中找出嚎新曲線,成為其余的各無人系統的行動依據。
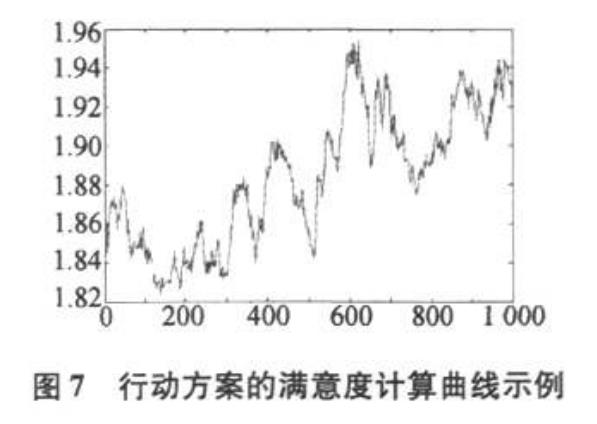
軟件仿真是用MATLAB編程進行的,群體的規模設為16,交叉概率設為0.6,變異概率設為0 001。運行的結果如圖7所示:16個無人系統選擇行動方案的滿意度計算曲線。從曲線可以看出當評價函數值達到1.9時的迭代次數。仿真程序中迭代1000次,以便觀察評價函數值形成的曲線。
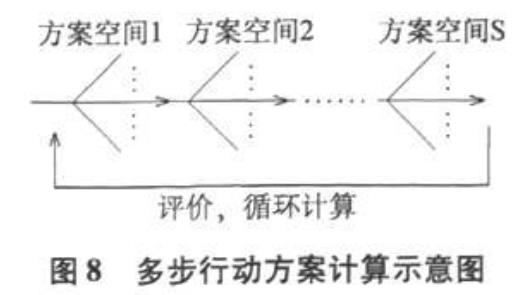
有時需要得到不止下一步,而是多步甚至是全部行動方案時,可進行連續計算如圖8所示。前述的評價函數稱為橫向評價函數。多步計算的評價函數稱為縱向評價函數。此時不存在硬約束的情況,需規定每步的滿意度最低分值,并計算總分.得到評價分。
在結構(1)和(2)的情況下.控制中心將各無人系統的方案分發各系統。
在結構(3)的情況下,每個無人系統分別各自計算出行動方案,并分發給其他無人系統。各系統分別對這~種方案進行排序,取得評價分最高的,若得分相同則取編號靠前的。這樣各自分別自動找到一個相同的方案,并寅施行動。當無人系統增加或減少,則重新計算方案,以適應變化的情況。
4 結語
本文將顯示控制群的設備自組織方法用于無人系統群的自動控制技術研究。采用顯控群理論和方法,使無人系統組成的系統群形成自組織自適應的作戰能力。這個方法可以用于未來戰爭中夫規模的機器人群的自組織作戰。即使失去人工操作,這個群將繼續上作、能自行組織,形成優化的作戰方案,并盡最大可能來自動執行預定的作戰任務。






















