


7月1日,在“2024(第四屆)低速無人駕駛場景生態共建拓展大會”上,由低速無人駕駛產業聯盟、新戰略低速無人駕駛產業研究所主編,探維科技、導向公司、芯探科技等聯合參編的《低速無人駕駛行業用傳感器產品發展藍皮書(2024版)》(下稱《藍皮書》)正式發布!
《藍皮書》指出,針對不同場景的感知需求特點,傳感器產品應用在不同類型的低速無人駕駛車輛上,打造的傳感器融合方案有所不同。目前,行業領先的傳感器產品供應商,已經通過技術創新助力各類低速無人駕駛車輛加速落地商用。(文末附電子版獲取方式)
無人接駁
近年來,隨著行業對無人接駁車輛在開放道路機動車道的應用和落地訴求增加,越來越多的城市啟動了相關項目的示范運營。據悉,按照應用場所和執行任務的不同,無人接駁車輛可具體劃分為無人接駁巴士、無人接駁觀光車等。
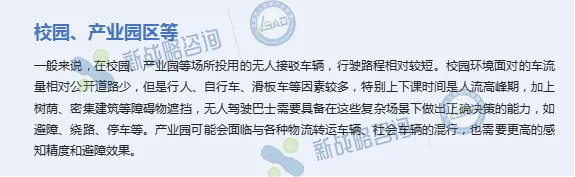
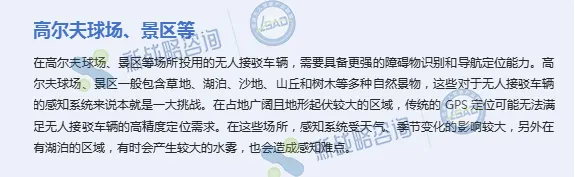
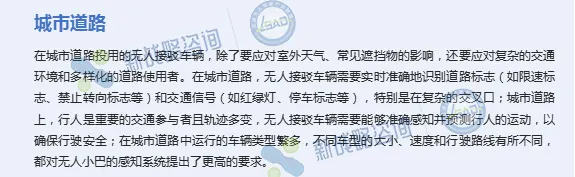
無人接駁車輛在不同場景的感知難點
以智行者與金龍客車聯合推出的Robobus為例,該車是面向園區、半開放道路及開放道路運營投放的自動駕駛產品。為推動Robobus在更多場景的商業化落地,車身搭載了攝像頭、激光雷達、超聲波雷達、毫米波雷達等各種環境感知傳感器。探維科技的Focus激光雷達為主雷達,安裝于車身前向位置。

探維科技激光雷達產品用于無人接駁巴士
據悉,探維科技Focus激光雷達主打“超高清、超視界”,是一款192線束產品,擁有120°超寬視野,FoV為120°×25°,最遠探測距離達到300m,能夠對目標物體進行光學測距,實現對周圍環境的精準感知。Focus以高性能、高可靠性為無人接駁巴士提供豐富的感知數據,結合后臺高階算法,保證識別精準度和目標跟蹤準確性,賦能出行安全與用戶體驗。
無人安防巡檢
近年來,投用安防巡邏/巡檢機器人的目標主要分為確保企業安全生產和城市治安維護。其中確保企業安全生產主要用于電力行業、石油化工行業、礦產開采行業、數據中心行業等,城市治安維護主要用于配合民警、安保人員在商場、機場、廣場等公共場所監控環境異常情況、排查警情等。

安防巡邏/巡檢機器人的感知難點
電力行業是安防巡檢機器人應用最廣泛的場景之一,在變電站中,巡檢機器人可以檢查變壓器、斷路器、隔離開關等設備的運行狀態和溫度,及時發現設備異常和故障;在輸電線路中,巡檢機器人可以沿著線路進行巡檢,檢查線路的運行狀態和安全隱患;在配電房中,巡檢機器人可以檢查開關柜、電纜等設備的運行狀態和溫度,及時發現設備異常和故障。但在這些場所,電磁干擾是影響感知效果的重要因素之一。

導向公司超聲波雷達產品用于安防機器人
城市治安維護在智慧城市建設中的確占據重要地位,隨著科技的發展和智慧城市建設的推進,各地方公安系統近年來顯著加大了安防巡邏機器人的采購需求。但安防巡邏機器人需要在人流量大、流動性強、環境復雜的場景中運行,在人群密集的場所,機器人需要準確地識別出障礙物并精準避障,但由于人群的繁雜性和流動性,這一任務變得更加困難。
以上種種感知難點,都對傳感器的性能提出了更高要求。導向公司的超聲波雷達產品KS114,自2019年上市以來,已經廣泛用于巡檢機器人、電力機器人、軌道機器人、清潔機器人等多個領域。該產品經受各種不同惡劣戶外環境的考驗,無論風吹、日曬、雨淋,均保證了運行零故障率,產品復購率極高。
KS114還衍生出了多款針對特殊環境的高性能產品,如KS114N,在零下40℃的極寒低溫環境也可以正常工作;KS114NE,可以抗電磁干擾其允許臨近電機布置而不被干擾,而其自體聲波識別技術可以避開大部分干擾。這些性能優勢,有利于巡檢機器人在變電站、配電房等場所保持穩定精準的環境感知。
無人駕駛清潔環衛
《低速無人駕駛清掃車行業發展藍皮書(2024版)》指出,2023年無人駕駛清潔環衛銷售規模約24.1億元,無人環衛車及商用清潔機器人(不含小型家用清潔機器人、墻面清潔機器人)落地超14000臺,在各低速無人駕駛細分場景中占比最高。隨著市政環衛智慧清掃項目的密集釋出,室外場景的無人駕駛清掃車正加速落地。
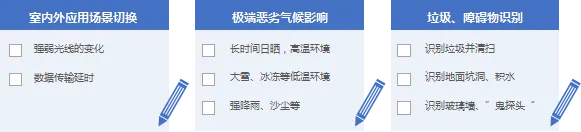
在室外,無人駕駛清掃車的感知主要包括行駛環境識別、可行駛區域邊界檢測、障礙物與交通參與者識別以及運動狀態判斷。想實現車輛的安全、穩定運行,需要重點解決的環境感知問題包括場景切換識別、惡劣氣候下導致的傳感器失效處理,垃圾、細繩等影響駕駛的小障礙物檢測以及坑洞、積水、臺階、施工等不可通行的道路異常情況檢測。
無人駕駛清掃車環境感知的主要難點
由于室外環境復雜,加上不同傳感器產品存在的不同的性能優劣勢,無人駕駛清掃車要準確獲取周圍環境信息,不能單靠一種傳感器,行業普遍采用的是多傳感器融合感知。
無人駕駛清掃車采用多傳感器融合,感知攝像頭可捕捉圖像識別算法需要的影像數據,毫米波雷達可準確測定清掃車與周邊物體的相對位置、相對速度和運動方向。車輛周身的激光雷達使用人眼安全的激光探測清掃車周邊物體,不僅可以適應各種氣候環境影響,還可以追蹤車輛前方、側方及鄰近車道的車輛,避免視覺盲區,保障行車安全。

芯探科技激光雷達產品用于無人駕駛清掃車
如芯探科技的XT-S240激光雷達用于無人駕駛清掃車,安裝在車頂前段。該產品據稱是業內目前最高線束的純固態Flash激光雷達,擁有超小體積,重量僅198g,但具有106°×80°的超大視場角,在20米測量范圍時能否覆蓋1800平米的面積,并且在強光100klux的環境下依然性能不受影響。同時,產品具有240線垂直線束,并視場內具有均勻的0.33°H x 0.33°V角分辨分布,能夠探測周圍視場范圍內的各類細小物體。
而對于檢測無人駕駛清掃車前方垃圾厚度,則需要超聲波雷達的輔助作用。特別是在室內應用的商用清潔機器人,準確檢測前方垃圾厚度,不僅可以幫助機器人更有效地規劃清掃路徑,還可以確保機器人在不同情況下都能達到最佳的清掃效果。如導向公司的KS219,是一款小波束角高靈敏度超聲波雷達,廣泛用于商用清潔機器人,不僅能檢測機器人前方垃圾厚度,還能檢測垃圾桶的滿溢情況,及時傾倒垃圾。
無人配送
無人配送是通過自動駕駛技術賦能,投用無人物流配送小車、配送機器人等產品,幫助緩解物流運力不足的壓力。同時,無人小車可以7×24小時全天候作業,提高配送效率。
末端無人配送車的主要感知難點
無人配送車的安全性和可靠性是用戶最關心的問題之一。《2023-2024年度中國低速無人駕駛產業發展研究報告》顯示,2023年我國末端無人配送車輛的銷售數量和規模增幅最為明顯。隨著今年杭州、蘇州、上海、北京等地繼續加大上路支持,快遞配送、生鮮配送等業務覆蓋面還將不斷擴大。
為了滿足未來規模商用的需要,無人配送車需要不斷提升感知精度,通過融合不同傳感器的數據,實現相互補充、減少誤差,提高整體感知的魯棒性和可靠性。

毫末智行小魔駝HD05的多傳感器融合圖示
一般末端無人配送車的傳感器配置包括激光雷達、攝像頭、毫米波雷達、慣導及天線等。如毫末智行的小魔駝HD05搭載高性能智能駕駛套件系統,選型乘用車已量產產品同型號傳感器,包括固態激光雷達、高清相機、毫米波雷達、定位及網絡設備,同時采用毫末自研車規級域控制器IDC 3.0,具備360TOPS高算力、高穩定性及豐富的傳感器/數據接口。
其中激光雷達應用在末端無人配送車上,可幫助執行的任務包括障礙物檢測、路線規劃、車輛定位、交通監管等多個方面。激光雷達可以實時地掃描道路上的物體,并將物體的位置和大小等信息生成三維點云圖,無人配送車通過激光雷達獲取到的點云數據進行避障、導航等,為無人配送車的安全、高效運行提供了重要保障。探維科技、芯探科技、圖達通等代表企業的激光雷達產品,都在無人配送小車上有廣泛的應用。
礦區無人駕駛
礦區無人駕駛主要是在礦產資源運輸環節,通過無人駕駛技術提高生產效率和安全性,主要應用的車型是無人駕駛礦卡和無人駕駛寬體自卸車,且以無人駕駛寬體車的應用占比為高。除了這兩種主要車型,鏟運車、膠輪運輸車等更多礦用專用車也逐漸實現無人駕駛。
礦區無人駕駛的環境感知難點,包括氣候環境、道路條件、駕駛環境等多個方面。如在露天礦,灰塵和粉塵問題尤為突出,不僅會影響傳感器的性能,還可能在前方形成一片塵霧,遮擋無人駕駛車輛的“視線”,影響探測質量,甚至導致誤判。下雨時,礦區道路會變得泥濘不堪,布滿水坑,這會導致道路缺乏明確的特征,增加車道邊界識別的難度。在新疆的不少礦區,通常還具有海拔高、溫度低、氣壓低、含氧量低等特點。
以特變電工新疆天池能源南露天煤礦為例,該礦所處地區四季變化明顯,尤其冬季寒潮來臨時,降溫劇烈,可至零下39攝氏度。同時露天礦區無遮擋,當地大風日數多、風力強,造成大量的煤塵。一系列極端氣候和惡劣工況,對無人駕駛感知硬件提出了更嚴格的要求。
據了解,易控智駕在該礦運營了203臺無人礦車,是全球單礦規模最大的無人礦車車隊。易控智駕選用了Seyond圖達通高性能“獵鷹”激光雷達作為前向主雷達,融入其無人駕駛整體方案。憑借“獵鷹”車規級的高可靠性以及1550nm波長的先天優勢,在項目常態化“安全員下車”連續運營期間,產品歷經極寒/極熱氣候、局部揚塵、陽光直射、強烈振動等考驗,始終能為無人礦車提供實時準確的環境感知,保障車輛行駛安全。

Seyond圖達通激光雷達產品用于無人礦車
特變電工南露天煤礦中的無人礦車采取多車編組運行的模式,得益于“獵鷹”的高精度遠距離探測能力,在全面提升無人車隊感知范圍的同時,還能準確探測到路沿、車轍線及落石等障礙物,幫助車隊在復雜的工況中更早、更穩定地發現潛在危險,為易控智駕無人駕駛系統提供更充裕的計算和執行時間,保障在礦區的安全、高效和穩定運行。
在井工礦,礦井內存在各種障礙物,如巷道、支架、設備、軌道等,這些障礙物形狀各異、大小不一,且可能隨時移動或變化,增加了無人駕駛礦車感知和避障的難度。礦井環境通常非常惡劣,如高濕度、高溫度、高粉塵等。另外,由于礦井深入地下,GPS信號通常非常弱或完全無法接收,這些都會給無人駕駛礦車的精確定位和導航帶來極大的挑戰,單一傳感器顯然無法滿足作業需要。
為應對井工礦的感知難點,除了采用多傳感器融合技術,利用車端傳感器和車聯網支持下的協同感知,也有利于實現車輛局部甚至礦井全局的精確詳盡感知。據悉,目前4D毫米波雷達在井工礦無人駕駛項目中發揮著越來越重要的作用。























