


而很長時間以來,無人駕駛在技術(shù)上都面臨著如何提高汽車視覺能力的難題。可以說,正是因為視覺識別技術(shù)的進步,無人駕駛汽車的發(fā)展才存在可能;也正是因為視覺識別技術(shù)的制約,無人駕駛技術(shù)的發(fā)展一直蹣跚不前。
2016年分別發(fā)生在美國和中國的兩起特斯拉自動駕駛狀態(tài)下的車禍致死事件,本質(zhì)上就是由視覺識別技術(shù)的缺陷所致。
汽車實現(xiàn)智能自動化必須滿足兩個條件:其一,滿足現(xiàn)實環(huán)境對無人駕駛汽車的要求。相比于智能手機,無人駕駛汽車面臨的環(huán)境更為復(fù)雜,任何一個失誤都可能關(guān)乎生命安全;其二,能夠應(yīng)對小概率事件,避免發(fā)生意外。
無人駕駛汽車與智能機器人的基本原理和社會環(huán)境基本相似。在機器人研究領(lǐng)域,機器人學(xué)家將這種只在1%時間內(nèi)才發(fā)生的突發(fā)性小概率事件稱之為 “極端事件(Corner Cases) ”。極端事件的不尋常之處在于,很少發(fā)生,但是一旦發(fā)生卻可能導(dǎo)致災(zāi)難性后果。
5月8日,在自動駕駛權(quán)威數(shù)據(jù)集Semantic KITTI上,達摩院憑借全新算法在“單幀3D點云語義分割”排行榜獲得第一。該技術(shù)用于達摩院的無人物流車后,大幅提升了車輛的環(huán)境精細化理解能力,使車輛能夠識別“厘米級”障礙物。
KITTI數(shù)據(jù)集是全球最權(quán)威的自動駕駛計算機算法評測數(shù)據(jù)集,為促進基于激光的語義分割研究,KITTI推出了細分?jǐn)?shù)據(jù)集Semantic KITTI。通過全類別分割平均交并比(mIOU)和整體準(zhǔn)確率(accuracy)兩大指標(biāo),考察參賽者的技術(shù)能力。達摩院團隊在兩項指標(biāo)的評比中均拿下第一。
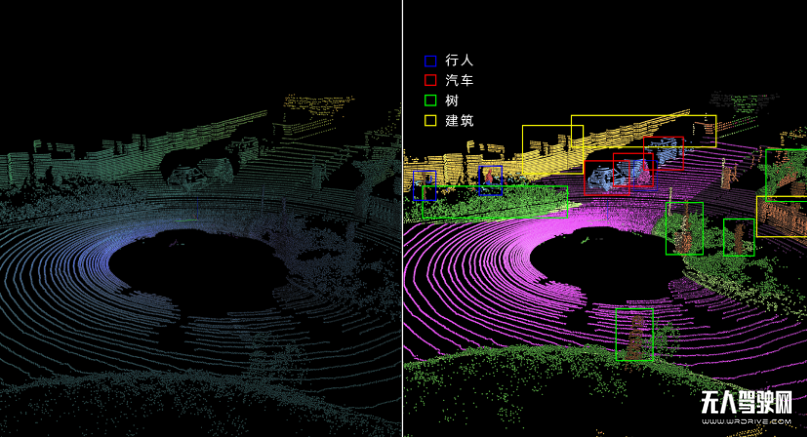
點云(Point Cloud)是擁有三維坐標(biāo)、強度等信息的激光點的集合,是計算機視覺領(lǐng)域常用的三維數(shù)據(jù)表示方式。自動駕駛車輛通常借助激光雷達、攝像頭、毫米波雷達等傳感器識別環(huán)境信息。對于激光雷達獲取的周圍環(huán)境的3D點云,識別每個點的語義標(biāo)簽,就是“3D點云語義分割”。
除了行人、車輛等常規(guī)檢測目標(biāo),道路周圍的建筑、綠化、不明障礙物也會影響自動駕駛車輛的駕駛行為。3D點云語義分割技術(shù)的目標(biāo),便是幫助車輛更精細地理解道路環(huán)境。
達摩院自動駕駛實驗室資深算法專家卿泉介紹,業(yè)界通用的點云局部上下文特征建模方法難以滿足自動駕駛實時、精準(zhǔn)的感知需求。達摩院提出的新算法以激光點為載體,結(jié)合每個3D點在鳥瞰、前視等視角下的鄰域特征,通過多層級聯(lián)編碼進行特征學(xué)習(xí),極大地增強了3D點的特征表示能力,由此提高了語義識別的準(zhǔn)確性。
該算法應(yīng)用于達摩院的無人物流車后,車輛對障礙物的精細化識別水平大幅提升。我們即將進入5G時代,5G網(wǎng)絡(luò)提供了更高的傳輸速率、精準(zhǔn)低時延控制和精準(zhǔn)定位,可以大大提高無人駕駛技術(shù)的信息收集回傳效率,從而實現(xiàn)車載與路側(cè)感知的信息融合。這就降低了車載系統(tǒng)的計算復(fù)雜度,有效解決了車車、車路協(xié)同問題。
可以預(yù)見,智能交通協(xié)同發(fā)展將成為一種趨勢,車輛的自主控制能力不斷提高。完全自動駕駛終將實現(xiàn),人和車的關(guān)系也終將被改變。






















