


1 引言
導航是智能車領域中基本問題,其任務是利用傳感器獲得的量測信息,對智能車當前位置進行精確的估計。智能車正常行駛中,動態(tài)模型通常都是在笛卡爾坐標系下建立的,而全球定位系統(Global Positioning System,GPS)量測值都是以極坐標形式表示,因此,智能車位置估計也就變?yōu)橐粋€非線性估計問題[1-3]。
當模型中的非線性因素不可忽略時,通常采用非線性濾波進行狀態(tài)估計。應用較廣泛的方法是擴展卡爾曼濾波器(Extended Kalman filer,EKF)[4-5],這種方法存在線性化誤差大、雅可比矩陣難于計算等缺陷,濾波不穩(wěn)定,甚至發(fā)散[6-7]。S.J.Juliear和J.K.Uhmann在1997提出基于無跡(Unscented,UT)變換的無跡卡爾曼濾波(UnscentedKalman Filter,UKF),其均值和協方差的估計比EKF方法要精確[7]。
UKF雖然克服了EKF存在的一系列問題,但系統噪聲相關信息的不確定性以及狀態(tài)模型擾動等都會影響UKF的濾波精度。鑒于此,本文提出了一種帶衰減因子的自適應無跡卡爾曼濾波算法(IMM—AFUKF),該算法基于交互式多模型結構(Interacting multiple mode,IMM) [3],克服了模型不確定性因素的影響,并引入衰減因子及自適應漸消因子[3]來修正預測誤差協方差,調整濾波增益,減弱舊數據對濾波的影響,從而消除濾波的發(fā)散現象。最終得到具有更高精度、更強抗擾動能力的濾波器,以滿足無人駕駛智能車控制系統的需求。
2 智能車導航系統控制原理
2.1無人駕駛智能車控制系統
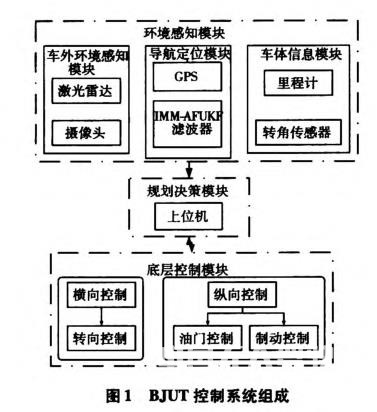
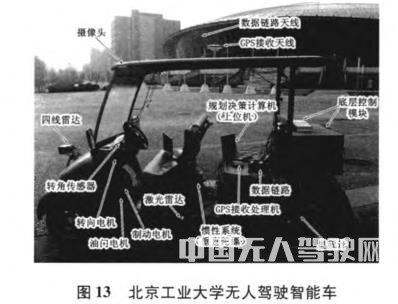
本文以北京工業(yè)大學無人駕駛智能車BJUT—IV為對象,研究其位置估計問題。BJUT—IV控制系統包含三大模塊:環(huán)境感知模塊,決策模塊,底層控制模塊,如圖1所示,其中環(huán)境感知模塊主要包括車外環(huán)境感知模塊、導航定位模塊、車體信息模塊。其中導航定位模塊提供車輛在全局地圖中的位置和速度,用于全局路徑規(guī)劃、路徑跟蹤,是否能提供快速、準確、可靠的導航信息直接決定上位機的決策的正確性,并最終影響底層控制的效果。
2.2導航系統車體位置模型
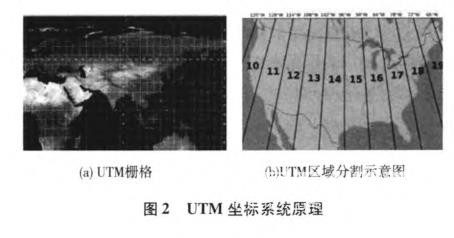
BJUT—IV采用GPS作為導航系統,GPS輸出坐標為ECEF坐標系統下的經度、緯度、高度,并不適合于平面運動的車輛導航。本文采用通用橫軸墨卡托坐標系(Universal Transverse Mercator,UTM)將經緯度轉化到平面坐標系,如圖2所示UTM坐標系統原理。在實際應用中,UTM坐標的轉換公式較為復雜,且在系統中有實時性的要求下很難達到,因此本文采用經過簡化處理的一組UTM坐標轉換公式[8-9],篇幅限制不再贅述。將坐標原點o定于北緯39.8719,東經116.4789,車體位置相對坐標原點關系如圖3所示。
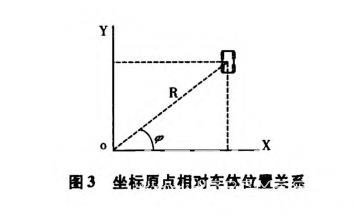
在直角坐標系下,車輛所處位置的方位角、斜距之間關系為
BJUT—IV的主要運動方式為勻加速行駛、勻速行駛、勻速水平轉彎,本文在不影響實際模型精度的情況下將勻速水平轉彎運動狀態(tài)近似為勻速行駛狀態(tài)。BJuT—IV行駛軌跡水平高差均值為41.6/m,無明顯高差,因此車輛縱向運動軌跡問題本文不加考慮。
為驗證提出的帶衰減因子的自適應濾波算法IMM-AFUKF的性能,文章第四部分將其與基于IMM模型的UKF濾波算法、基于勻加速運動模型(CA)的EKF濾波算法進行了仿真及實驗的對比和分析。
2.3導航系統運動控制模型
根據智能車的運動狀態(tài)與典型模型匹配程度及其復雜性,本文選擇兩個典型的二維智能車運動控制模型建立IMM模型組,分別為勻速運動控制模型(Constant Velocity,CV)、勻加速運動控制模型(Constant Acceleration,CA)[10-11]。
智能車運動學模型可表示為
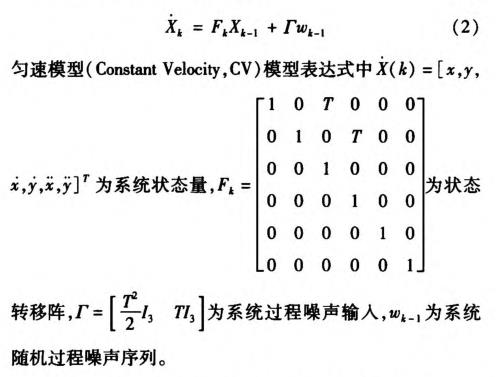
勻加速模型(Constant Acceleration,CA)取狀態(tài)變量X
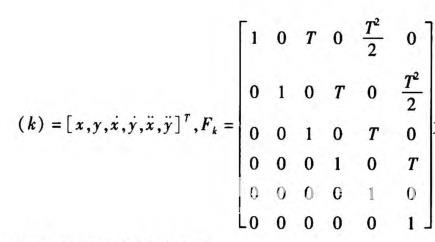
為狀態(tài)轉移陣,其它參數設置同上。
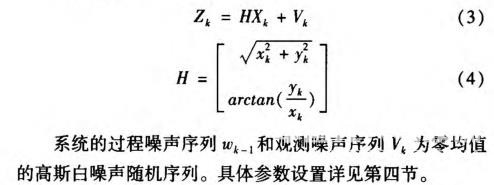
2.4濾波器量測模型
量測方程可由下式給出
2.5智能車導航系統技術難點
導航定位模塊中GPS提供的速度、位置、航向等導航定位信息本身帶有噪聲,且由于環(huán)境因素會產生較大誤差,需通過濾波器濾波后發(fā),發(fā)送至決策計算機進行決策并完成車體控制。
因此,研究具有更高性能的濾波器意在為車輛控制系統提供更快速、準確而穩(wěn)定的地理位置及速度信息。進一步講,濾波器的性能直接決定了導航定位系統的性能,并最終影響車體控制。所以,對于濾波器的優(yōu)化在導航定位系統乃至車輛控制系統中具有十分重要的意義。
現階段導航系統中,針對濾波器的研究仍然存在以下幾個難點問題:①實際路況中,存在大量非線性因素:智能車導航系統中濾波器普遍采用的擴展卡爾曼算法(EKF) [8],該算法雖能實現非線性濾波,但是濾波精度已無法滿足智能車導航的需求;②實際車況下,車輛運動狀態(tài)多變:目前采用無跡卡爾曼濾波(UKF)或UKF的優(yōu)化算法[7],在精度上較傳統的EKF有較大提高,但對于所提出的濾波算法的驗證局限于理想化的仿真模型,依舊無法與真正智能車行駛狀態(tài)相匹配;③由于真實路況下噪聲干擾,會造成濾波效果降低甚至發(fā)散:鑒于車輛行駛狀態(tài)的多變性,有學者提出采用交互式多模型(IMM)來逼近車輛真實狀態(tài)[15],取得較好濾波效果,但算法不具有自適應性,且歷史數據對濾波影響較大。因此,如何找到一種高精度的,可靠的,具有自適應性且能與無人駕駛智能車導航系統相匹配的濾波算法,仍然是現階段工作的技術難點。
3 多模型無跡卡爾曼濾波算法
3.1算法原理
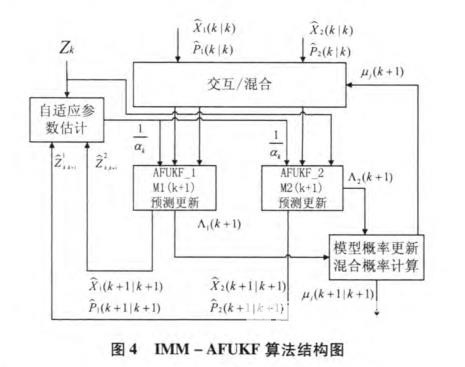
模型的匹配性不佳和噪聲統計特性的不準確經常導致UKF濾波性能降低[12-13],為了解決這一問題,本文引用自適應UKF濾波(Adaptive UKF,AUKF),該方法通過自適應漸消因子來平衡狀態(tài)方程、預測信息與觀測信息的權重,能實時地對模型誤差和噪聲統計特性進行估計并修正,較好地抑制模型誤差對導航解的影響,從而提高UKF的估計精度[14]。同時,加入衰減因子(Fading factor)[15-16],加大當前觀測量的作用,減小歷史觀測值的影響,達到抑制濾波發(fā)散目的。AFUKF有效克服了噪聲及與模型不匹配的不足問題,但對模型描述準確性仍要求較高,引入交互式多模型算法(IMM)可較好解決此問題。IMM包含多個濾波器、模型概率估計、交互作用器、狀態(tài)估計混合器,基本原理為:通過建立不同的模型來描述系統可能的運動模態(tài),模型間的切換由基于馬爾可夫鏈的轉換概率控制,對每個模型采用獨立的AFUKF,以模型轉移概率加權后的交互值作為濾波迭代輸入。通過輸出殘差不斷更新模型概率,對多個濾波器進行融合,使其盡可能地接近那個最能反映實際系統行為方式的模型濾波輸出。AFUKF是UKF的優(yōu)化,作為IMM結構中的并行濾波器,以下稱為IMM-AFUKF算法,結構示意圖4所示。
3.2算法流程
IMM—AFUKF算法具體步驟如下所示:
步驟1:計算混合概率系統非線性隨機的狀態(tài)空間模型為

步驟2:交互/混合

步驟3:模型濾波

4 仿真分析及實驗
4.1仿真及實驗分析
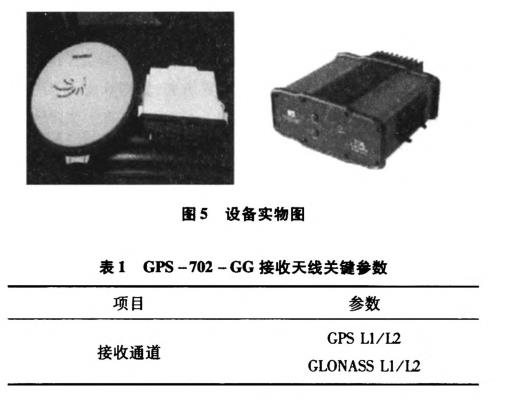
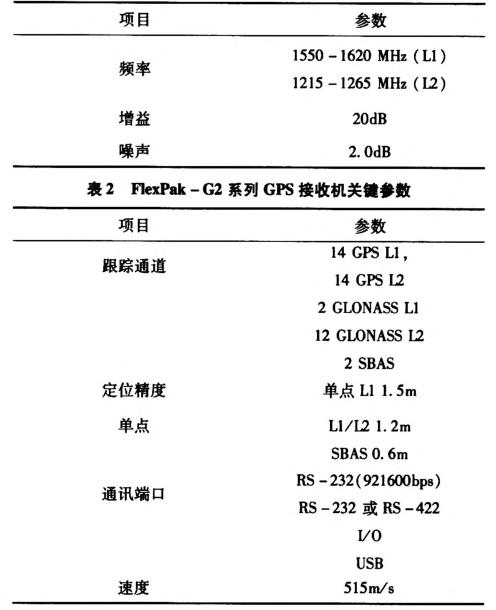
實驗室的智能車輛實驗平臺安裝應用載波相位技術的差分GPS(DGPS),設備組為FlexPak-G2系列GPS接收處理機和GPS-702-GG接收天線及PDL4535數傳電臺。設備實物如圖5所示,GPS-702-GG接收天線關鍵參數如表1所示,FlexPak-G2系列GPS接收處理機關鍵參數如表2所示。
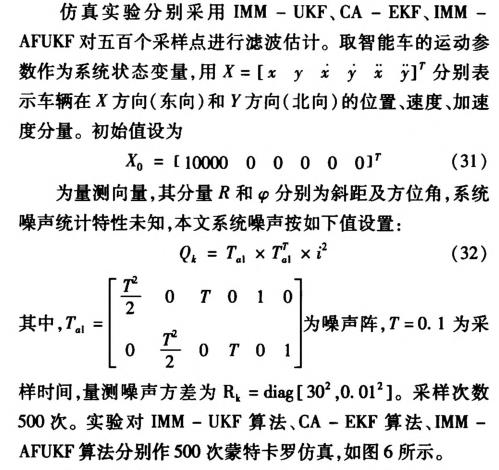
從仿真路徑圖中可看出,IMM-AFUKF與真實路徑最接近,誤差最小,CA-EKF,IMM-UKF均在彎道處理方面較為遜色。
同時,實驗的采用均方根誤差(Root mean square error,RMSE)定量分析并衡量算法優(yōu)越性[1-3],其定義為

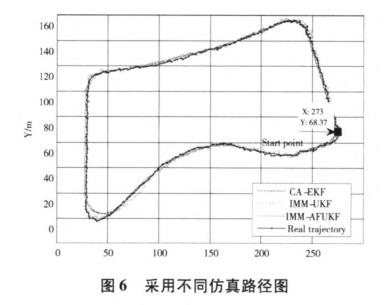
其中,n=500。RMSE越小,說明所采用的算法與真實值的誤差越小;運行時間越短,說明算法的計算量越小,在實際應用中數據輸出速度越快。圖7~12為采用三種濾波方法位置、速度、加速度均方根誤差曲線比較,表3為三種濾波算法均值和均方根誤差統計數據。
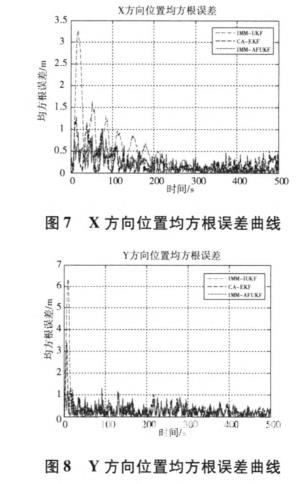
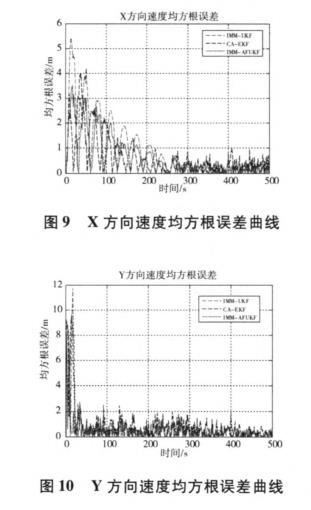
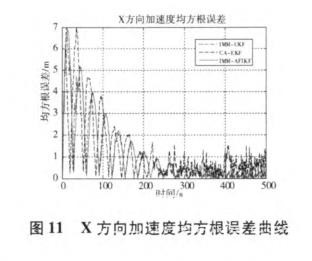
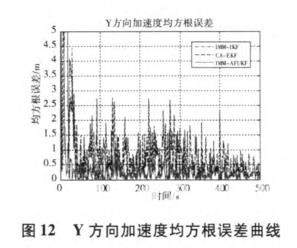
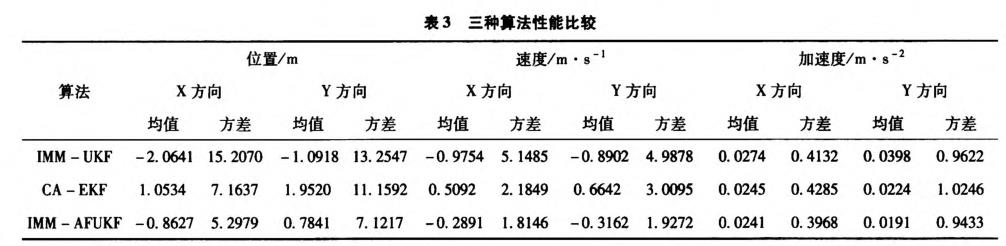
從仿真結果及性能統計值比較可以看出,在仿真的初始時刻,濾波器都有較大的初始偏差,這是由于初始估值造成的。隨著濾波的進行,IMM-AFUKF算法能很快地收斂到真值位置附近,并保持較高的濾波精度。IMM-AFUKF算法較IMM-UKF、CA-EKF算法提高了解算精度及收斂速度,狀態(tài)估計也更接近于真實狀態(tài),且增強了數值穩(wěn)定性,其中IMM-AFMUKF算法的位置和速度的均方根誤差明顯小于標準IMM—UKF算法。究其原因,主要在于IMM-AFUKF算法引入了衰減因子,加大了對新測量值的利用權重,減少了對陳舊測量值和初始估值的依賴,同時增加自適應漸消因子,能夠較好的抑制初始值偏差和模型異常擾動誤差對導航解的影響,使算法具有一定的自適應能力。因此,IMM-AFUKF算法有效的控制了初始值偏差、模型異常擾動誤差、以及未知噪聲對濾波解的影響。
4.2實車實驗
本文以北京工業(yè)大學無人駕駛智能車BJuT-IV為實驗對象如圖13所示,研究其行駛軌跡的跟蹤問題。
BJUT-IV由高爾夫球電動車經過對電控系統的改裝而成。BJUT-IV采用GPS作為導航系統,并用UTM將經緯度轉化到平面坐標系,重新定義坐標原點O于北緯39.8719,東經116.4789即圖14中N8點為原點。BJUT-IV控制系統以Microsoft VS2008為軟件開發(fā)平臺,編寫了導航與定位系統軟件,利用此軟件平臺進行實驗驗證,用以檢驗IMM-AFUKF算法在智能車導航系統中的可靠性。實驗分別采用KF(綠色軌跡)、IMM-UKF(黃色軌跡)、CA-EKF(藍色軌跡)、IMM-AFUKF(紅色軌跡)對實際道路采樣點進行濾波估計(橙色軌跡代表真實道路)。取智能車的運動參數(位置、速度、加速度)作為系統的狀態(tài)變量,采用東北天坐標系。
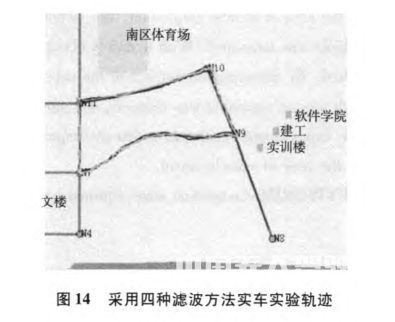
實驗車輛沿道路車道線線行駛,根據實際情況做變速及勻速運動。實車實驗結果表明,IMM-AFUKF算法較其它算法更準確、穩(wěn)定;且在車輛轉彎時性能更加突出,如圖14中N10點和N9點彎道放大圖所示,紅色軌跡(IMM-AFUKF)幾乎與橙色軌跡(實際道路)重合,黃色軌跡(IMM-UKF)與綠色軌跡(KF)均與實際行駛軌跡有較大偏差且有較大滯后性。所提出算法更貼切的反應車輛實際行駛軌跡,該實驗結論與仿真結果一致,再次驗證所提出算法優(yōu)越性。
5結束語
在北京工業(yè)無人駕駛智能車BJUT-IV導航系統中,UKF處理非線性問題較EKF性能優(yōu)越,然而,UKF算法對模型匹配度要求較高、受系統噪聲影響較大,且對初始值較敏感,為此,本文在UKF中引入衰減因子及自適應漸消因子,并結合IMM濾波結構,提出了一種針對BJUT-IV導航系統的濾波算法IMM-AFUKF。理論分析、仿真、實車實驗結果均表明,IMM-AFUKF算法的濾波精度、穩(wěn)定性、收斂速度都明顯優(yōu)于標準IMM-UKF及EKF算法,具有較高實用價值。
該算法改善了導航系統精度,為上位機的控制決策提供良好的導航信息數據,將無人駕駛智能車控制系統整體性能進行了提升。為進一步改進IMM-AFUKF對初始值過于敏感等情況,需要在魯棒性方面做進一步的探討;并需克服模型轉換時濾波精度降低的問題,以上兩點將作為后續(xù)工作重點。
參考文獻:
[1]楊柳.改進卡爾曼濾波的目標跟蹤研究[J]·計算機仿真,[J] 2010—9:351—355.
[2]付夢印,鄧志紅,張繼偉.Kalman濾波理論及其在導航系統中的應用[M].北京:科學出版社,2003.
[3]秦永兒,張洪城,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北土業(yè)大學出版社,1998.
[4]Yang Yuanxi,Gao Weiguang.A new learning statimic for adaptive filter based on predicted residuals[J].Progress in Natural SCience,2006—8:833—837.
[5]Cui Xianqiang and Yang Yuanxi.Adaptively robust filtering with classified adaptive factors[J].Progress in Natural Science,2006—8:846—851.
[6]Gao Sheshenga,Gao Yia,Zhong Yongminb,Wei Wenhuia.Random Weighting Estimation Method for Dynamic Navigation Positioning[J].Chinese Journal of Aeronautics,2011—3:318—323.
[7] 黃銚,張?zhí)祢U,高清山,李越雷.一種提高無跡卡爾曼濾波精確度的方法[J].計算機仿真,2010,03:348—352.
[8] 王凡.智能車輛中基于GPS和陀螺儀的導航與定位[D].北京工業(yè)大學。2013.
[9] 王凡.智能車輛中基于GPS和陀螺儀的導航與定位[D].北京工業(yè)大學。2013.
[10] 潘泉,劉剛.聯合交互式多模型概率數據關聯算法[J].航空學報,999,(3):234—238.
[11]You Lilan,bu Dajie,Huang Jian,Liu Xue,Zhou Kechang.The Mathematic Models of the Kalman Filtering for Across—Fault Measurement[J].Earthquake Research in China,1994—3:92—103.
[12] 范韜,茅旭初.基于非線性濾波算法的高動態(tài)GPS定位模型[J].計算機仿真,2011—10:66—69.
[13] Liu Ye,Yu Anxi,Zhu Jubo,Liang Diannong.Unscented Kalman filtering in the additive noise case[J].Science China(Teehnological Sciences),2010-4:929—941.
[14] Hu Hmdong and Huang Xianlin.SINS/CNS/GPS integrated navisanon algorithm based on UKF[J].Journal of Systems Engineering andElectronics.2010一1:102—109.
[15] 陸可,肖建.IMM算法實現非線性狀態(tài)估計的研究與仿真[J].計算機仿真,2008—5:77—80,104.
[16]Yang Yuanxi,Gao Weiguang.An optimal adaptive Kalman filter[J].Journal of Geodesy,2006,80(4):177 183.
[17]夏啟軍,孫優(yōu)賢,周春暉.漸消卡爾曼濾波器的最佳自適應算法及其應用[J].自動化學報,1990—3:210—216.






















