


經過一個多世紀的發展,汽車以其特有的優越性飛速發展,汽車保有量直線上升。但是,人們在享受汽車帶來便捷的同時,也面臨著嚴峻的交通問題。因此,智能車輛的研究如雨后春筍般在世界各國開展起來。
基于機器視覺的車道線檢測識別是智能車輛輔助駕駛系統的關鍵技術之一。車道線檢測就是從攝像頭獲得的圖像中,將車道線與背景進行分離,從而獲得車道線的走向等信息[1]。目前國內外已經提出了許多車道線的檢測識別方法,早期的一些簡單算法主要利用車道線固定且顏色明顯(如黃色和白色)對車道線進行識別,往往有很大的局限性;后來的復雜算法抗干擾能力強,但是處理速度及實時性較差。因此,如何準確、快速地檢測識別出車道線已成為智能車輛輔助駕駛系統的一個重要問題。針對道路特點以及對車道線識別的準確性和魯棒性等要求,本文主要對圖像分割(二值化)過程中的3種算法進行對比,得出效果較好的最大類間方差的算法;在邊緣檢測過程中對Sobel算法進行改進[2];在車道線識別的過程中應用了霍夫變換[3],有效準確地對車道線進行識別。

1 道路圖像預處理
采集到的道路圖像的處理過程如圖1所示。輸入圖像后,首先對道路圖像進行預處理,然后進行圖像分割,最后對車道線檢測識別。
采集道路圖像時,受到外界因素的影響,獲取的圖像無法完全體現原來圖像的所有信息,所以必須首先對道路圖像進行預處理,達到抑制無關信息、改善圖像質量、提取感興趣部分以及突出本文所需要的車道標志線信息等效果。
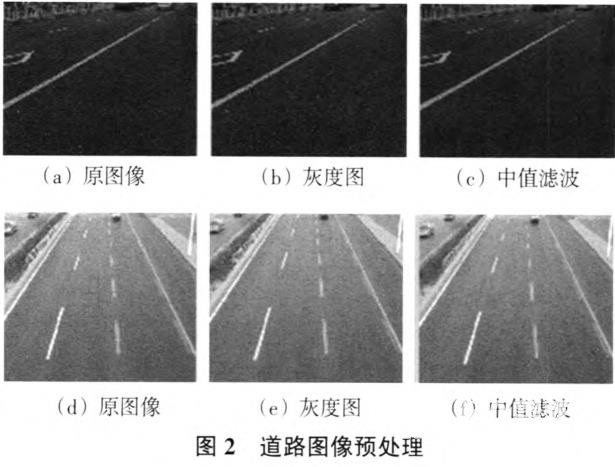
對于機器視覺(車載相機)獲取的道路圖像,預處理一般分為道路圖像灰度化、道路圖像去噪以及圖像濾波增強等方式。本文采用加權法對圖像進行灰度化,用中值濾波對圖像去噪,圖像預處理后的實驗效果圖如圖2所示。
2 道路圖像閾值分割
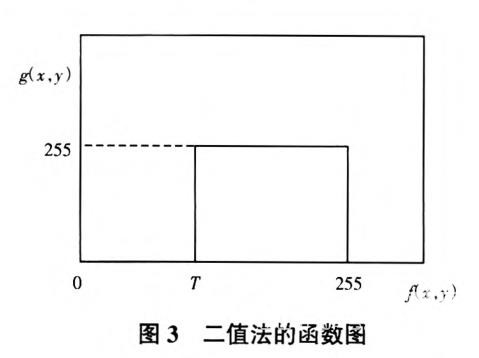
本文對道路灰度圖像主要采用閾值法分割,即將圖像二值化,選擇一個合適的閾值,將原始的圖像轉換成黑白二值圖像。灰度閾值分割法的處理函數為:

式中:f (x,y)為原始圖像中的像素值;g(x,y)為處理后的黑白圖像的像素值。灰度閾值分割法是一種非線性運算,其函數圖如圖3所示。
本文研究灰度圖像二值化的3種自動閾值算法。一般自動選取閾值可以使處理后的圖像達到穩定可靠的效果。
2.1迭代法閾值分割
迭代式閾值選擇方法的基本思想是開始選擇一個閾值作為初始估計值,然后按照某種規則不斷地更新這一估計值,直到滿足給定的條件為止[4]。下面是一種迭代算法:
(1)選擇圖像灰度T作為初始估計值。
(5)重復步驟(2)至步驟(4),直到逐次迭代得到的T值小于先前定義的參數T值。
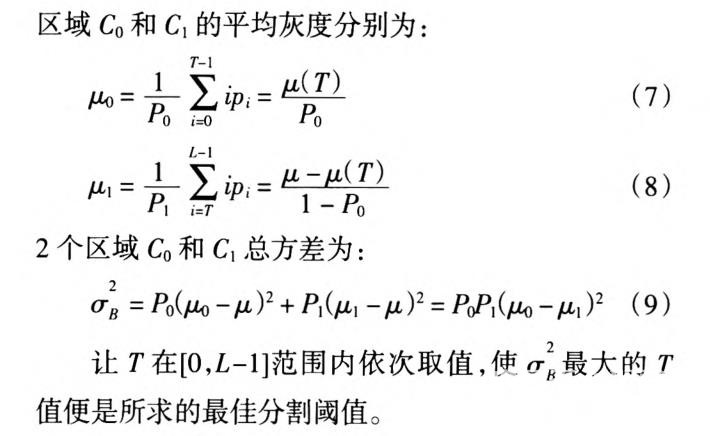
2.2最大類間方差法(OTSU法)
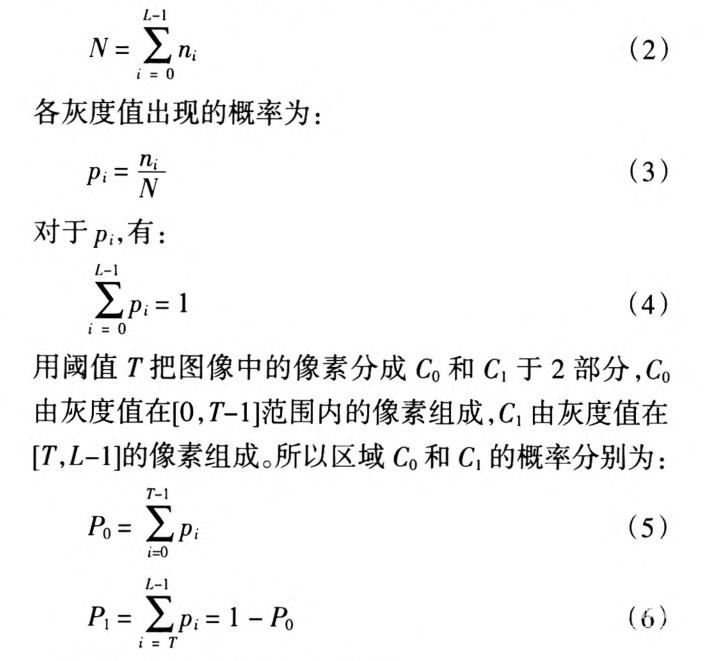
最大類間方差法[5] (又稱大率法)是一種使類間方差最大的自動確定閾值的方法,該方法具有簡單、處理速度快的特點[6]。其思想為設圖像中灰度值為i的像素數為ni灰度范圍為[0,L-1],則總的像素數為:
2.3分水嶺算法
分水嶺算法是一種應用了形態學理論的分割方法,其核心思想是將一幅圖像看成一個拓撲地形圖,將灰度值f(x,y)定義為對應地形高度值,其中高灰度值代表著山峰;低灰度值代表著山谷。水總是朝地勢低的地方流去,直到在局部低洼處停下來,岡此稱這個低洼處為吸水盆地。全部的水分聚在不同的吸水盆地,吸水盆地之間的山脊叫作分水嶺。水從分水嶺流下來,朝不同吸水盆地流去的概率是相等的。將這種思想應用于圖像閾值分割,等于在灰度圖像中找出不同的吸水盆地和分水嶺,完成閾值分割,這種算法被稱為分水嶺算法。分水嶺算法的分割原理示意圖如圖4所示。閾值分割的3種算法性能比較效果圖如圖5所示,3種算法進行閾值分割實驗所用的時間如表1所示:
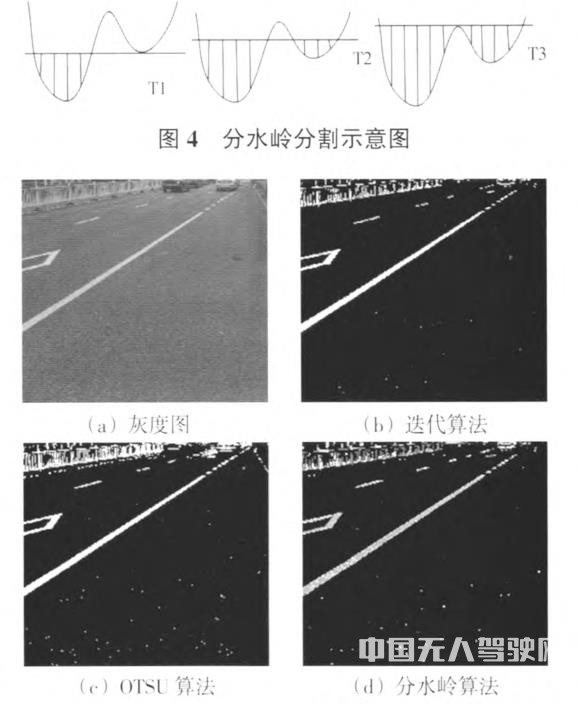
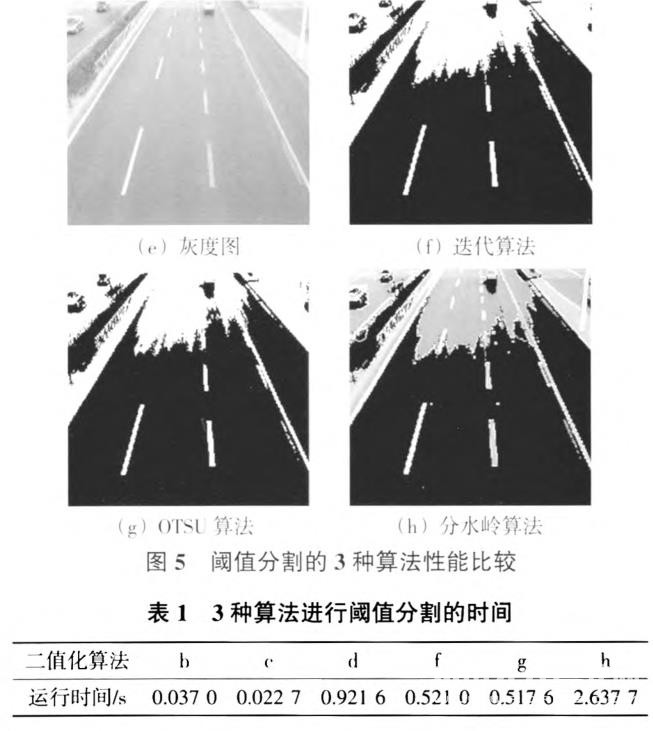
圖5對3種閾值分割方法進行了比較,可以看出,迭代法閾值和最大類間方差法閾值的效果較好。從表1也可以看出最大類間方差法處理圖像速度更快,所以本文采用最大類間方差法對圖像進行二值化,以此得到比較理想的效果。
3 道路圖像邊緣檢測
道路圖像邊緣檢測算法有Roberts算子、Log算子、Prewitt算子、Canny算子和Sobel算子。其中Sobel邊緣提取算法在圖像空間上易于實現,可以平滑噪聲,能夠提供較為準確的邊緣信息。
3.1經典Sobel算子
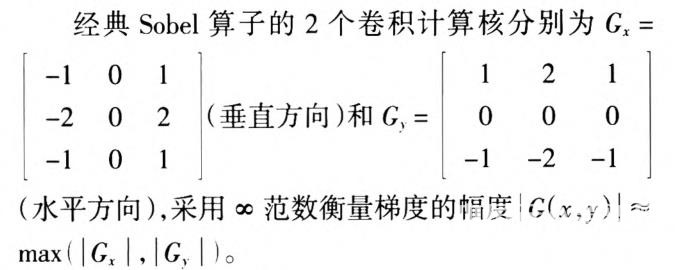
3.2改進的Sobel算子
道路圖像中的車道線具有斜直線性特征,最強邊緣方向接近正負45度,所以本文采用改進的算子模板來進行邊緣提取,模板如圖6所示。經典Sobel算法和改進算法的實驗效果圖如圖7所示。
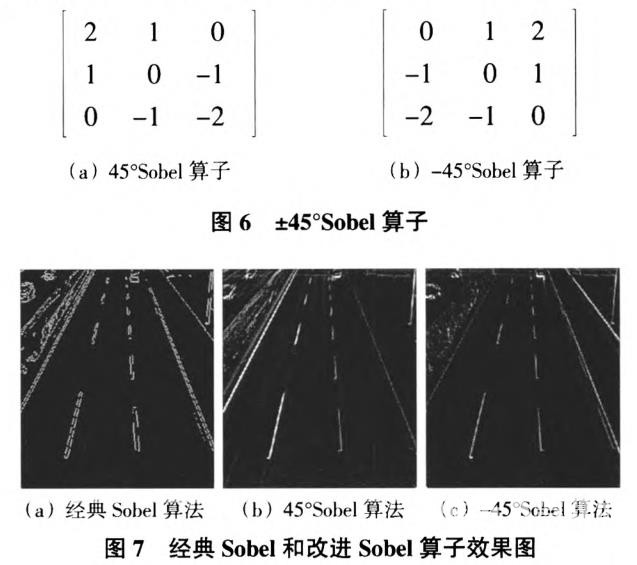
比較圖7(a)、(b)和(c)可以看m,采用經典Sobel算子可以增強車道線的邊緣,減少路面等干擾因素,但是車道線兩側邊緣增強增加了識別的難度;改進的Sobel算法只是增強了車道線的內側,容易識別,也保證了精度。所以本文采用改進的Sobel算法對車道線進行邊緣提取。
4 基于霍夫變換的車道線識別
霍夫變換是一種非常重要的檢測間斷點邊界形狀的方法,它通過將圖像坐標空間變換到參數空間來實現直線和曲線的擬合。本文主要研究結構化道路[7]中直線車道線識別。在極坐標中用參數方程表示一條直線
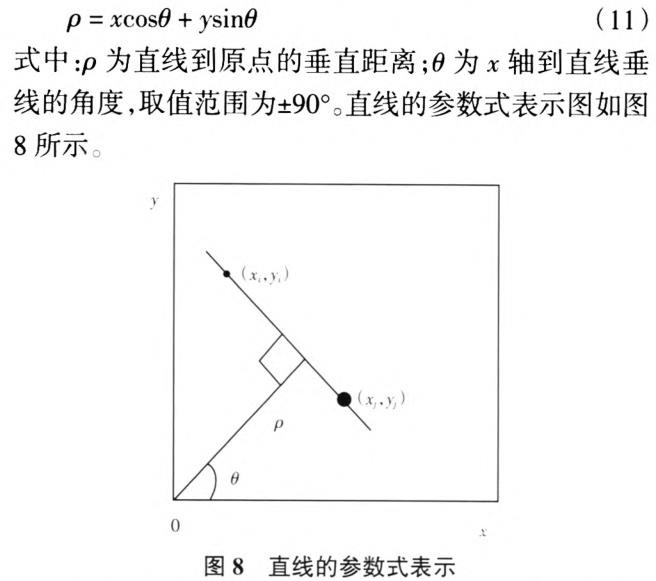
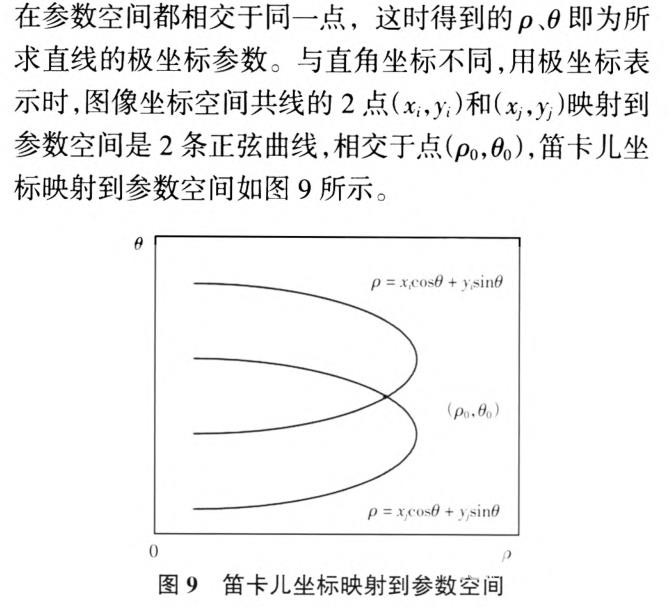
與直角坐標類似,極坐標中的霍夫變換也把圖像坐標空間中的點變換到參數空間中。用極坐標表示時,圖像坐標空間中共線的點映射到參數空間以后,在參數空間都相交于同一點,這時得到的P、θ即為所求直線的極坐標參數。
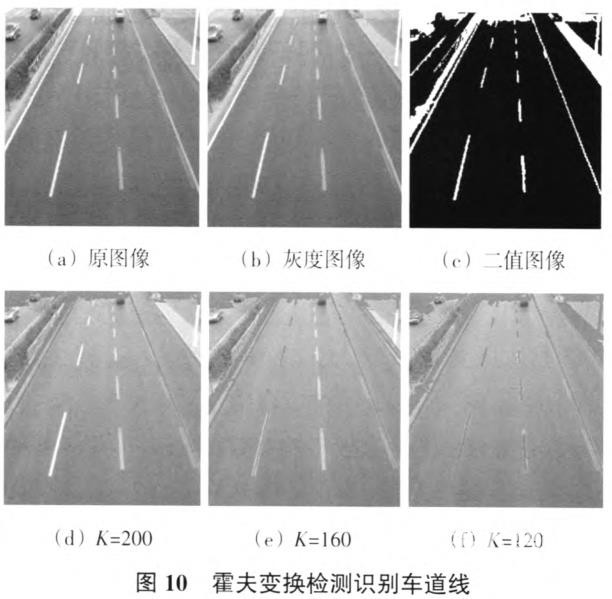
經過霍夫變換檢測出的車道線圖像如圖10所示。設提取直線時得閾值為K,由圖10可以看出,提取直線的閾值越大,無關細節也會減少;提取直線的閾值越小,無關細節也可能增加。通過對閾值的適當調節可使提取直線的效果更好:
5 結束語
本文主要針對結構化道路對比了二值化的3種算法,最終得m效果較好的OTSU算法;在經典Sobel算法的基礎上做了改進,得m了改進的Sobel算法;采用霍夫變換的檢測方法對車道線進行識別,取得了較為理想的效果。但是對于路面上存在嚴重干擾或者非結構化道路的情況,這種方法的車道線識別準確度還有待提高。
參考文獻:
[1]許宏科,秦嚴嚴.一種基于Hough變換的車道線檢測新方法[J].徐州丁程學院學報,2013(4):1—4.
i2]侯利龍.高速公路車道線檢測算法研究[D].鄭州:河南工業大學.2012.
[3]侯立龍,狄帥.直線模趔下的高速公路車道線檢測方法研究[J].清遠職業技術學院學報,201 1(6):73—76.
[4]張錚,倪紅霞,苑春苗,等.精通Matlab數字圖像處理與識別[M].北京:人民郵電}lj版社.2013.
[5] 吳一全,潘赫.2維最大類問平均離差閾值選取快速遞推算法[J].中國圖象|j2.|彤學報,2009,14(3):471—476.
[6]張德E數字罔像處理[M].北京:人民郵電出版社,2009.
[7]CHENG H Y,Y C C,TSENG C C,et al.Environmentclassification and hierarchical lane detection for structured and unstructured roads[J].IET Computer Vision,2010,4(1):37-49






















