


0 引 言
無人駕駛汽車是未來智能交通的重要組成部分,其中車輛線控轉向系統的控制是關鍵技術之一[1,2]。由于轉向系統本身具有一定的非線性,并且在工作過程中存在負載變化大,易受外界干擾等特點,目前常用的PID控制[3]、滑模控制[4]等方法很難得到理想的控制效果.針對上述問題,采用自抗擾控制實現無人駕駛車轉向系統的控制.自抗擾控制是由中科院系統科學研究所韓京清研究員提出的一種魯棒非線性控制方法,該控制通過擴張的擾動觀測器實時估計并補償系統運行時受到的各種“外擾”和“內擾”的總和作用,并結合特殊的非線性反饋結構實現良好的控制品質,具有超調小、響應快、精度高、抗干擾能力強、算法簡單等特點,并且適于數字化實現[5]。
1 無人駕駛車線控轉向系統介紹
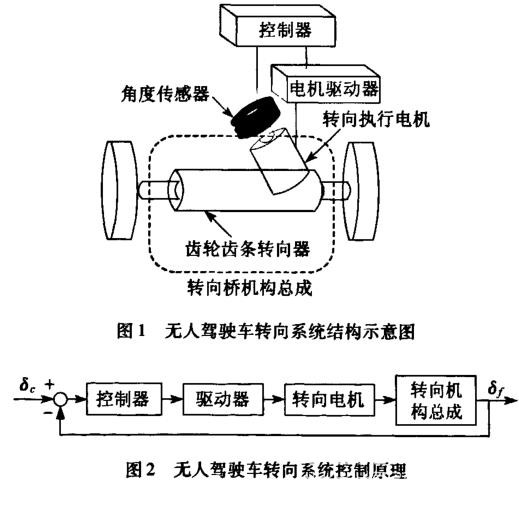
無人駕駛車轉向系統的作用是根據路徑規劃指令,控制前輪的轉動,使車輛沿規劃的路徑行駛.系統組成如圖1所示。系統工作過程中,轉向控制器根據路徑規劃指令,生成前輪轉角命令信號。該信號將與角度傳感器或齒條位移傳感器反饋的實際前輪轉角信號進行比較,利用兩者的差值,通過一定的控制算法生成轉向電機指令信號(電壓或電流信號),指令信號再通過電機驅動器驅動轉向電機轉向,從而實現車輛方向的改變,整個系統的控制原理如圖2所示。
2 轉向系統動力學分析

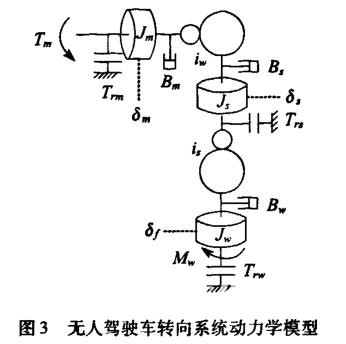
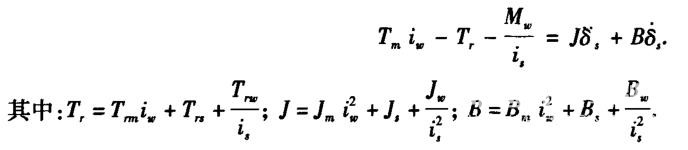
根據上述轉向系統動力學模型,通過進一步向轉向小齒輪的等效化簡,得到轉向系統的動力學方程如下:
考慮到運用電機驅動器來對轉向電機進行電流閉環控制,其控制帶寬可達500 Hz,而轉向系統的工作帶寬小于10 Hz,因此這里不再考慮轉向電機電磁特性對電機輸出轉矩的影響,將電機驅動器電壓輸入到電機電磁力矩輸出簡化為比例環節,即:

根據式(1)、(2)、(3),并將摩擦阻力矩Tr與Mw氣假設為線性特性,可得整個轉向系統傳遞函數如下:

3 二階自抗擾控制器的設計[6-8]
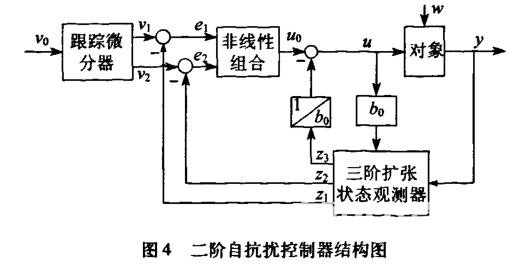
由上一節推導的轉向系統傳遞函數可知,該系統的已知部分是—個二階系統.根據自抗擾控制器的選擇原則,控制對象的最小階數決定自抗擾控制器的階數,故這里選擇二階自抗擾控制器作為系統的控制器二階自抗擾控制器由3個部分組成,即跟蹤微分器、擴張狀態觀測器和非線性組合,其結構如圖4所示。
圖4中,V0為控制目標,V1是V0的跟蹤信號,V2是V0的微分信號;Z1是控制對象輸出y的估計信號,Z2是y微分的估計信號,Z3則是對系統狀態和模型不確定性以及外部擾動的總體估計;e1、e2是誤差及其微分,u為控制量,b0是對反饋放大系數的估計。
控制器各部分的離散表達式
(1)跟蹤微分器
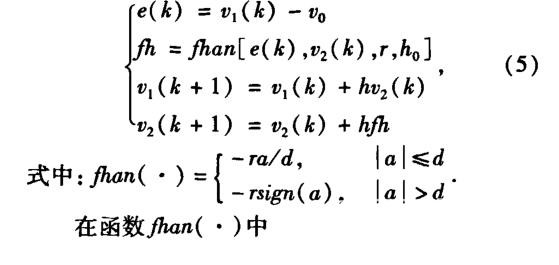
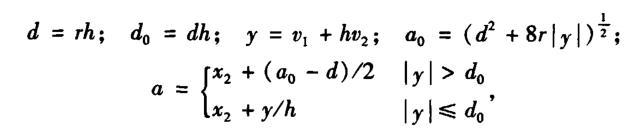
其中:h0為濾波因子;r為速度因子;h為積分步長。
跟蹤微分器是一個非線性動態環節,它能夠快速無超調地跟蹤輸入信號并給出較好的輸入信號的微分。同時,通過對濾波因子h0和速度因子r的調節,可以使得控制目標的給出符合系統實際響應特性,從而有效地避免經典調節理論中因設定值的突變而造成控制量的劇烈變化以及輸出量的超調,獲得更為理想的控制特性。
(2)擴張狀態觀測器
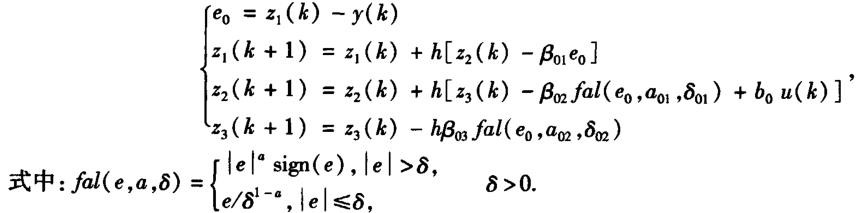
擴張狀態觀察器是自抗擾控制器的核心部分,它采用非線性狀態觀測器對系統的狀態進行觀測,其中的擴張的狀態量是對系統狀態和模型的不確定性等內擾以及外部擾動的反映.在控制量中,通過對擴張的狀態量進行補償,可將原來的控制系統轉化為線性的積分串聯型控制系統,大大增強了該控制器對系統的適應性.
(3)非線性組合
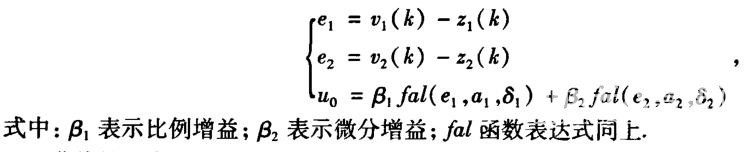
非線性組合實質是一種非線性狀態誤差反饋控制律,它將經典PID當中的線性加權轉換成反饋效率更高的非線性組合,得到非線性PD控制器,以此提高系統的控制品質。
4 仿真研究
4.1整車模型介紹
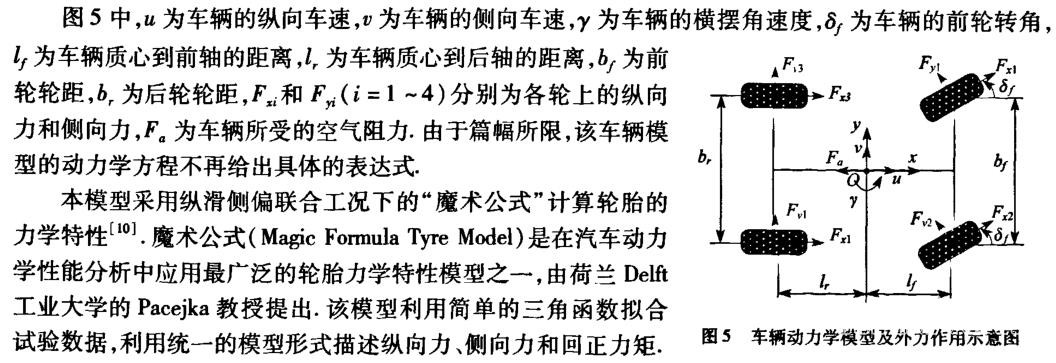
為了更好地模擬輪胎回正力在不同工況下對轉向系統的影響,本研究中的整車模型采用非線性七自由度車輛動力學模型[9],如圖5所示.這里的七自由度是指汽車縱向速度、側向速度與橫擺角速度3個整車運動自由度和4個車輪的回轉運動自由度。
其表達式如式(8)所示。

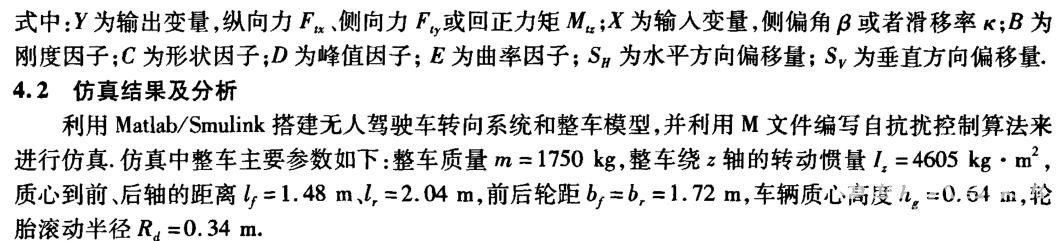
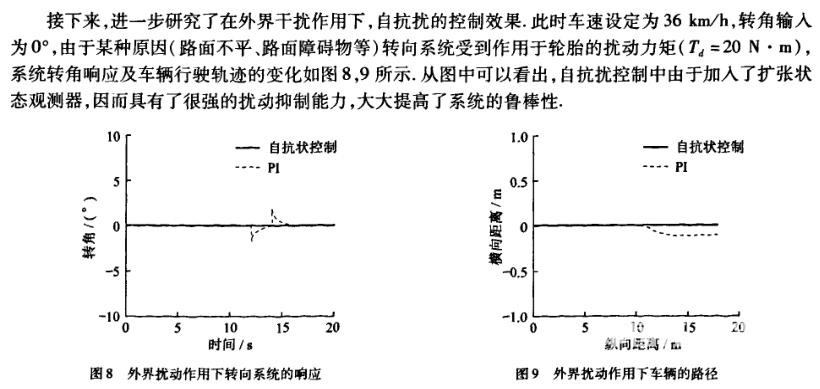
仿真研究首先檢驗了自抗擾控制器的控制能力,在車速為10 km/h的工況下,給車輛以階躍轉角信號200和180。(相當于前輪轉角1.25度和11.25度),考察轉向系統的輸出響應,并與常用的PI控制器進行了對比,結果如圖6,7所示.從圖中可以看出:①自抗擾控制可以有效地實現對系統的控制;②由于設計了考慮系統自身響應能力的過渡過程,因而其控制效果好于PI控制,沒有出現PI控制的超調現象;③對不同的轉角輸入自抗擾控制的適應性好,沒有出現PI控制中由于控制目標的變化而出現動態過程變差的現象.如圖7中所示,PI控制在轉角輸入為180度時動態過程振蕩加劇,而自抗擾控制的動態過程和轉角輸入為20度時幾乎是一樣的。

5 結論
針對無人駕駛車轉向系統的特點,在分析轉向系統動力學特性的基礎上,設計了二階自抗擾控制器來控制轉向系統的轉角.采用七自由度非線性車輛模型,在Madab/Smulink環境下進行了仿真研究。研究結果表明:
(1)自抗擾控制器可用于無人駕駛車轉向系統的控制,具有較高的控制精度和很寬的控制范圍;
(2)自抗擾控制器具有很強的擾動抑制能力,可有效提高系統的魯棒性;
(3)使用自抗擾控制器無須獲得控制對象的精確模型,簡化了控制器的設計,提高了控制器的實際使用價值。仿真過程中,也發現了自抗擾控制器的一些問題:①控制參數較多,調節比較困難;②控制器的輸出有一定的抖動.如何有效地解決上述問題,使自抗擾控制器能用于轉向系統實際控制,將是下一步研究的重點。
參考文獻:
[1] HOP,ST J,BARBERAA.Trajectory generation for an on.road autonomous vehicle[J].Proceedings of the SPIE。UnmannedSystens Technology VⅢ,2006,6230:62302J.
[2] 秦貴和,葛安林,雷雨龍.智能交通系統及其車輛自動控制技術[J].汽車工程,2001,23(2):92—96.
[3] BOLOGNAMI S,TOMASINI M,ZIGLIOTrO M.Control design of a steer—by—wire system with high performance PM motor drives[J].IEEE,2005,5:1839—1844.
[4] JANG S H,PARK T J,HAN C S.A control of vehicle using Steer-by·Wire system with Hardware·in-the-Loop—Simulation system[J].Proceedings of the 2003 IEEE/ASME,2003,3:389—394.
[5] 阮久宏,李貽斌,榮學文.高速移動平臺橫向運動自抗擾控制[J].山東工業大學學報(工學版),2008,38(4):5—10.
[6] 韓京清.從PID技術到“自抗擾控制”技術[J].控制工程,2002,9(3):13—18.
[7] 韓京清.擴張狀態觀測器參數與菲波納奇數列[J].控制工程,2008,15(S1):1—3.
[8] 要曉梅,王慶林,劉文麗,等.一般工業對象的二階自抗擾控制[J].控制工程,2008,9(5):59—62.
[9] 趙治國,余卓平,孫澤昌.車輛主動前輪轉向H*魯棒控制系統研究[J].汽車工程,2005,27(4):443—451.
[10] PACEJKA H B.Tm and Vehicle Dy,lamies[M].2nd ed.Burlington:Butterworth-Heinemann publications,2006.






















