


近日,西井科技COO章嶸發(fā)表了題為《碼頭全工況無人駕駛作業(yè)車的量產(chǎn)挑戰(zhàn)》的演講,介紹了港區(qū)內(nèi)無人駕駛技術(shù)商用量產(chǎn)化的企業(yè)需求、落地挑戰(zhàn)和應(yīng)用實(shí)踐。
一、碼頭人力成本高昂 呼吁無人駕駛技術(shù)
章嶸介紹到,碼頭是一個特殊的、獨(dú)立的作業(yè)場地,主要包括岸橋區(qū)域,堆場區(qū)域,閘口區(qū)域。
他說到,港口的運(yùn)輸任務(wù)通常是把貨物從岸邊轉(zhuǎn)運(yùn)到路側(cè),或從路側(cè)轉(zhuǎn)運(yùn)到岸邊,要完成這些任務(wù),需要大量的港口機(jī)械,而港口機(jī)械的技術(shù)發(fā)展,經(jīng)歷了四個重大變革周期。

前兩個技術(shù)周期,主要都圍繞著人工操作的機(jī)械發(fā)展,包括船只、港口龍門吊、港口岸橋、場橋的設(shè)計優(yōu)化等。
從第三個周期開始,自動化的趨勢就越發(fā)明顯,標(biāo)志性事件是1992年荷蘭碼頭開發(fā)的全球第一個自動化碼頭。但這個周期主要針對于新建碼頭的自動化建設(shè),不涉及已建碼頭的自動化改造。
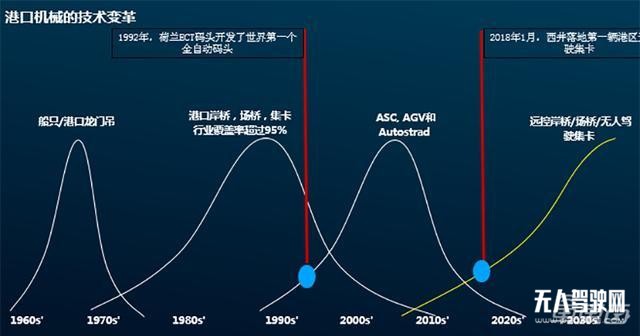
從第四個周期開始,港口機(jī)械技術(shù)發(fā)展的重點(diǎn)就變成了幫助傳統(tǒng)的碼頭進(jìn)行智能化、自動化改造。
他說到,港口企業(yè)有很大的自動化改造需求,因?yàn)榇a頭工作環(huán)境差,工作強(qiáng)度大,對從業(yè)人員資格和經(jīng)驗(yàn)要求高,即便付出高昂的人力成本,企業(yè)也很難招到工人。
老碼頭如果要采用AGV(自動導(dǎo)引運(yùn)輸車)模式,則需要重新改造基建設(shè)施,改造成本和維護(hù)成本都很高,并且改造后缺乏靈活度。但如果采用碼頭全工況無人駕駛作業(yè)車,就能有效解決這個問題。
對西井科技來說,他們選擇在港口落地無人駕駛技術(shù),一方面原因是港口企業(yè)有很強(qiáng)的付費(fèi)意愿和付費(fèi)能力。另一方面原因是,港口是一個封閉場景,無人車可以作為港口機(jī)械在場內(nèi)運(yùn)作,這一技術(shù)形成的渠道壁壘強(qiáng)。
二、已拿到海外訂單 封閉場景無人車面臨5大挑戰(zhàn)
章嶸介紹稱,他們目前已發(fā)展出兩條非常清晰的產(chǎn)品線,第一個是他們自主開發(fā)的,基于人工智能的無人駕駛重型卡車;另一個是他們和振華重工一同開發(fā)的港口無人跨運(yùn)車,這款車也賣到了瑞典。
他說到,西井科技作為一家初創(chuàng)公司,面對國內(nèi)外眾多無人車巨頭能率先獲得海外訂單,主要原因是他們的發(fā)展路徑非常明確,從一開始就確定了要實(shí)現(xiàn)港口無人駕駛商業(yè)化落地,并稱,其落地進(jìn)程主要有三個階段。
一是港口工況適應(yīng)階段,這個階段是驗(yàn)證單車無人駕駛在港口環(huán)境的適配性與安全性;二是小范圍局部試運(yùn)營階段,涉及到多車的整體調(diào)度;三是大規(guī)模全工況商用階段,涉及了港口全工況V2X(車聯(lián)網(wǎng))協(xié)調(diào)。
章嶸說到,大家都認(rèn)為無人車在封閉場景應(yīng)用非常簡單,在開放道路應(yīng)用很難,其實(shí)不然,無人駕駛技術(shù)在封閉場景的應(yīng)用也有許多不一樣的難點(diǎn),從單車無人駕駛適配性來說,有三大挑戰(zhàn)。
首先是無人車融入港口業(yè)務(wù)流程難,精準(zhǔn)定位要求高。
他介紹稱,無人車跟港口機(jī)械交互的精度要求非常高,跟岸橋、軌道吊、輪胎吊等設(shè)備的鎖頭對位精度要求是厘米級的,超過3.5厘米就無法完成,但開放道路下只要求20厘米的縱向精度。
其次是港口通行環(huán)境復(fù)雜,與公開道路相比,港口的行駛車道更加狹窄,標(biāo)線也更復(fù)雜。
最后是港口環(huán)境動態(tài)變化大,港口的車道可能會因業(yè)務(wù)變動而發(fā)生變化,也可能有周期性的變化,因此無法依據(jù)固定的地圖來做定位。
另一方面,從多車無人駕駛技術(shù)適配性來說,也有兩大挑戰(zhàn)。
一是交互安全性要求高。港口的安全性要求包括港口機(jī)械與無人車的交互安全、無人車之間的交互安全、有人/無人駕駛混跑下的交互安全。他說到,他們考慮的不僅是無人車駕駛的安全,還有整個流程的安全。
二是車隊(duì)效率要求高。在開放道路,僅需考慮單車從A點(diǎn)到B點(diǎn)行駛的安全性和效率,但在港口,他們需要考慮整體車隊(duì)的效率。
三、V2X系統(tǒng)支持無人車運(yùn)作 全局優(yōu)化方案可降低成本80%
關(guān)于西井科技無人駕駛技術(shù)落地的成果,章嶸介紹到,他們在2018年1月完成了第一代基于柴油車線控底盤改制的無人駕駛重型卡車,能夠?qū)崿F(xiàn)單車作業(yè)。
在2018年6月,研發(fā)完成了第二代線控底盤改制的無人集卡WellTruck D1,能夠?qū)崿F(xiàn)多車作業(yè),并做好了這款新能源集卡的量產(chǎn)準(zhǔn)備。
在2018年9月,他們發(fā)布了新一代無人集卡Q-Trunk,能夠?qū)崿F(xiàn)150公里續(xù)航,擁有成熟穩(wěn)定的線控底盤及多車作業(yè)V2X系統(tǒng),這一款車將在今年7月實(shí)現(xiàn)量產(chǎn)。
從其產(chǎn)品的單車智能來看,他們使用了多傳感器融合方案,包括毫米波雷達(dá)、激光雷達(dá)、攝像頭等。
從制導(dǎo)系統(tǒng)來看,西井科技制定了港區(qū)內(nèi)的三級制導(dǎo)策略,來適應(yīng)港區(qū)內(nèi)不同區(qū)域內(nèi)的導(dǎo)航定位需求。
據(jù)介紹,西井科技的無人集卡擁有自動抓箱系統(tǒng)和自動放箱系統(tǒng),自動抓箱系統(tǒng)可以實(shí)現(xiàn)近100%的一次抓箱成率,而人工操作的一次抓箱成功率還不到70%,同時,其自動放箱系統(tǒng)能實(shí)現(xiàn)厘米級開底誤差和堆箱誤差。
西井科技自主開發(fā)了一整套車隊(duì)管理系統(tǒng),同時搭載了2D和3D的用戶展示和操作界面,可以把場區(qū)所有的港口機(jī)械和集裝箱都虛擬到這套系統(tǒng)里進(jìn)行管理。另外,他們開發(fā)了一套模擬器,可以幫助用戶在改造碼頭之前,就知道改造之后能達(dá)到什么樣的工作效率。
章嶸介紹稱,V2X技術(shù)是支持其無人車運(yùn)行的關(guān)鍵。去年,他們已經(jīng)完成了整個V2X系統(tǒng)的設(shè)計和封閉測試。
在場區(qū)內(nèi)不同區(qū)域,他們設(shè)置了不同的傳感器來采集和傳輸信息,能夠掌握箱區(qū)內(nèi)集裝箱的情況,并用攝像頭來抓取和追蹤港區(qū)內(nèi)人工駕駛集卡的位置,同時利用RTK差分基站來實(shí)現(xiàn)更精準(zhǔn)的定位。
演講最后,章嶸說到,西井科技是全局智慧化港口解決方案的提供商,其無人車可以無縫對接智慧港口系統(tǒng),V2X系統(tǒng)能夠讓港口機(jī)械實(shí)現(xiàn)信息互通,全局優(yōu)化所有的作業(yè)步驟,基于此,他們致力于打造全球第一個真正的無人智慧碼頭。
通過章嶸的演講可以看到,中國企業(yè)通過具體場景下的商業(yè)化、規(guī)模化落地?zé)o人駕駛技術(shù),已經(jīng)取得了一些成就,其技術(shù)在國內(nèi)若干港口落地,成功收獲海外訂單即是最佳證明。
但同時需要注意的是,無人駕駛技術(shù)即使在封閉港區(qū)落地也不是一個簡單的事,還需要針對具體環(huán)境做技術(shù)適配,將無人車與碼頭業(yè)務(wù)融合,做好港口全局優(yōu)化等。






















