


中央系統指揮控制復雜系統的益處往往顯而易見。比如通過大腦控制眼睛和腿,我們才能走直線。但這類系統,無論是天然的還是人造的,偶爾也會出現嚴重漏洞。美國最近部分政府停擺期間,其社會經濟活動的重要領域嚴重受損。這生動說明了當一個國家的中央控制單元突然關閉的話會產生什么樣的后果。神經退行性疾病中腦細胞的死亡日益摧毀身體的控制者(大腦),顯示了生物系統也具有同樣弱點。
避開中央系統機制有其優點。缺少一個“大腦”來指導行為意味著單個部件的缺失對集體的行為影響很小。由喬治華盛頓大學的物理學家尼爾·約翰遜(Neil Johnson)領導的一個研究小組開發了一個分散系統模型,該模型成功地模擬了果蠅幼蟲的運動。這項研究于2月6日發表在《科學進展》(Science Advances)雜志上。研究表明當模型的單個部分功能較弱時,其表現最佳——組件越簡單,整個系統效果越好。相比之下,集中式系統的組成部分只有經過改進后,其功能才會更好。研究人員認為,這一發現有可能影響多個領域,從無人駕駛汽車的設計到神經系統疾病的治療再到組織結構的各個方面,甚至可能對理解進化過程有啟示作用。
分散控制的例子在自然界的生物中比比皆是,在細菌、粘液菌和蟻群中都能找到。約翰遜在觀察中獲得靈感:由于果蠅幼蟲的神經回路非常簡單,在運動過程中,果蠅幼蟲的各個部分以半獨立的方式活動。這是單一生物體中分散控制的一個例子,與蜜蜂或其他具有集體行為的動物所體現的“群體智能”截然相反。盡管沒有中央系統協調果蠅幼蟲身體的各個部分,但它們總能實現向期望溫度移動的目標——這一過程被稱為趨溫性。
果蠅幼蟲通過收縮身體向前蠕動。當幼蟲部分身體延展而另一部分收縮時,它們就會轉彎。熱敏神經元決定了果蠅身體各個部位的運動,這些運動的綜合效應決定其轉向角度。約翰遜說:“幼蟲的協調運動方式類似于人群協調移動從而到達出口。并不是大家相互電話告知往出口走,而是根據外界信息,這種集體聚集行為自然而然就會發生。”
研究人員創建了一個數學模型,該模型使用獨立的組件再現幼蟲的運動,這些組件將過去運動的結果存儲在記憶中(如果結果表明模型與目標方向很好地一致,則定義為1,否則定義為0)。每個組件通過參考一組“策略”根據過去的結果選擇下一個動作(左轉還是右轉),這些策略將過去不同的結果集合與不同的轉彎方向聯系在一起。研究人員將所有可能策略的不同子集分配給不同的模型組件(與幼蟲中半獨立的部分相對應),在某種程度上改變它們的行為——每個模型代理在每一步都選擇了最佳策略。研究小組發現這個模型產生的爬行軌跡,看起來非常像幼蟲爬行的真實數據,這使得他們相信自己捕捉到了真實系統中的一些本質。圣達菲研究所(Santa Fe Institute)的數學家大衛·沃爾伯特(David Wolpert)沒有參與這項研究,他說:“這項研究能和果蠅的爬行軌跡匹配起來真的很棒。表明我們在理解這些問題方面邁出了很好一步。”
這一關鍵發現與組件的記憶規模的變化有關。在記憶容量非常小的情況下,模型表現得很差——但是在容量超過一定大小之后,它的性能也會逐漸變差。
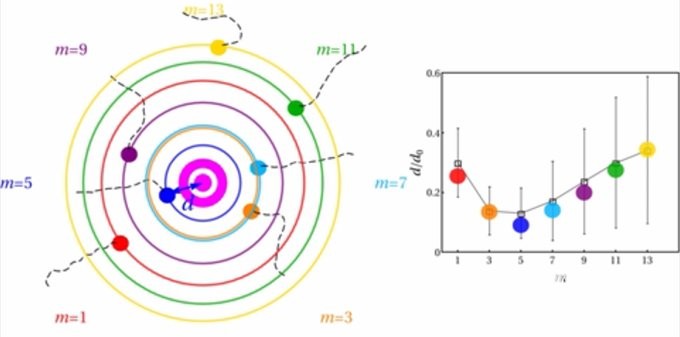
如果一個系統的組成部分變得過于聰明(這里用“m”變得越來越大來表示越來越聰明),那么這個系統就會離預定目標(d區)越來越遠。圖片來源:Pedro D. Manrique
研究人員使用“群體/反群體”理論來解釋這一結果,該理論是單獨的組件如何形成一個擁有一致行為的群體的數學描述。當記憶容量很小時,就會形成大量的組件,朝著同一個方向推進。它們先是大轉彎,然后突然轉向另一個方向,產生夸張的之字形運動。如果這些組件有太多的記憶,群體就會被長久以來由過去的結果所決定的策略所困,而沒有充分考慮到表明他們偏離了方向這一眼前信息。
在這兩個極端之間會出現一個最佳規模,即使用相反策略的中等規模的群體,就像賽艇時船的兩邊都有一半人在劃槳一樣。約翰遜說:“當你增加記憶時,就相當于過度思考。有太多歷史,就會強化過去的偏見。”沃爾伯特說,有時單一組件處理問題時也會產生類似的效果。他表示:“當人們(根據過去的價值觀)預測股市時,他們小心翼翼,不去過多關注過去的見解。因為太關注過去會帶來雜亂,學習起來更加困難。”
該團隊聲稱,這項工作可能提供一種新的思路,來思考進化是如何實現從天然的分散設計(如細菌)跨越到使用集中設計的人類等生物的。這意味著,在分散設計中,在不切換到集中設計的情況下,組件的的“聰明”程度會有一定的限制。該小組下一步計劃研究用激光摧毀果蠅幼蟲的部分神經回路(有點像劃槳時部分槳手喪失功能)如何影響運動。研究小組還想通過類似于將兩個槳手綁在一起,或者在愚笨的劃手中間插入一個擁有超級記憶的劃手的模式來探索這個模型的行為。最終,約翰遜希望能從該模型中尋求可能的醫學意義。未來的研究將探索在帕金森癥等疾病中,給某些肌肉提供有限的反饋是否有助于抑制由大腦控制信號受損引起的震顫。約翰遜說:“我們將考慮在患有一般運動神經元疾病的情況下,申請經費準確完成這一研究。我們不知道它是否實際可行,但在我看來,我們至少已經證明了它在理論上是可行的。”
本研究可能應用的其他領域包括無人駕駛汽車設計和組織表現。然而,沃爾伯特很謹慎。他說,該研究沒有將該模型與其他任何模型進行比較,因此體現的分散控制優于集中控制的方面并不多。他指出,工程系統可以通過簡單的復制來減輕單個控制的不足。但也有不適用的情況,當一組機器人士兵在執行特殊任務時,作為一個整體,它們工作時需要保持無線電靜默。“機器人不允許交流,所以它們必須以分散的方式運行,”他指出,“這些結果表明,作為(設計)工程師,為了實現總體目標,至少應該考慮限制機器人的認知能力。”






















