


什么是自動(dòng)駕駛
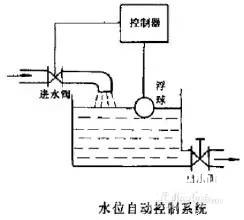
飛機(jī)的自動(dòng)駕駛功能也是自動(dòng)控制的一種形式,所謂自動(dòng)控制就是在沒(méi)有人直接參與的情況下,利用外加的設(shè)備(控制器),使機(jī)器、設(shè)備(控制對(duì)象)的某個(gè)工作狀態(tài)或參數(shù)自動(dòng)地按照預(yù)定的規(guī)律運(yùn)行;它通過(guò)對(duì)系統(tǒng)的輸出不斷地,直接地或間接地、全部或部分地返回,并作用于系統(tǒng),其本質(zhì)是通過(guò)信息的傳遞、處理與反饋實(shí)施的一種控制。
 自動(dòng)控制發(fā)展的五個(gè)階段:
自動(dòng)控制發(fā)展的五個(gè)階段:
控制方式
舉例
1
機(jī)械反饋信號(hào)控制
抽水馬桶、普通內(nèi)燃機(jī)排氣閥門
2
電流模擬信號(hào)控制
自動(dòng)沖水龍頭、各類電子傳感器
3
計(jì)算機(jī)控制
全自動(dòng)洗衣機(jī)、汽車發(fā)動(dòng)機(jī)電子控制組件
4
分布式控制
服務(wù)器、飛機(jī)發(fā)動(dòng)機(jī)計(jì)算機(jī)
5
總線式控制
自動(dòng)駕駛儀、自動(dòng)油門
飛機(jī)的自動(dòng)控制模式是一種集機(jī)械反饋信號(hào)控制、電流模擬信號(hào)控制、計(jì)算機(jī)控制、分布式控制為一體的總線式控制,它的控制器與執(zhí)行器相互分離,并且?guī)в袡z測(cè)器。
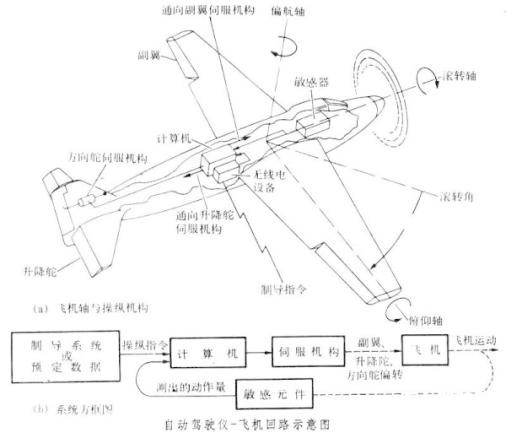 飛機(jī)的自動(dòng)駕駛原理具體描述就是計(jì)算機(jī)根據(jù)探測(cè)到的大氣數(shù)據(jù)信息、姿態(tài)及加速度數(shù)據(jù)和導(dǎo)航數(shù)據(jù),計(jì)算出各階段符合飛行原理和導(dǎo)航原理要求一些舵面和油門位置參數(shù),通過(guò)控制飛機(jī)舵面和油門實(shí)施飛行,同時(shí)檢測(cè)出各種實(shí)際飛行參數(shù)與理想狀態(tài)的差值進(jìn)行修正。
飛機(jī)的自動(dòng)駕駛原理具體描述就是計(jì)算機(jī)根據(jù)探測(cè)到的大氣數(shù)據(jù)信息、姿態(tài)及加速度數(shù)據(jù)和導(dǎo)航數(shù)據(jù),計(jì)算出各階段符合飛行原理和導(dǎo)航原理要求一些舵面和油門位置參數(shù),通過(guò)控制飛機(jī)舵面和油門實(shí)施飛行,同時(shí)檢測(cè)出各種實(shí)際飛行參數(shù)與理想狀態(tài)的差值進(jìn)行修正。
自動(dòng)駕駛還提高一些自動(dòng)防護(hù)功能,包括坡度限制,失速保護(hù),超速保護(hù),防擦尾,防荷蘭滾等。飛機(jī)的檢測(cè)器將提供系統(tǒng)狀態(tài)顯示、ECAM警告信息、語(yǔ)音警告、音響警告、失速抖桿、燈光警告等各類反饋和警告信息。
飛機(jī)自動(dòng)駕駛控制目標(biāo)是要使飛機(jī)按照飛行原理來(lái)運(yùn)行,包括滿足力矩平衡、穩(wěn)定性和操縱性的規(guī)律,滿足升力、速度與姿態(tài)三者之間的對(duì)應(yīng)關(guān)系要求,同時(shí)滿足飛行各階段操縱要求和導(dǎo)航要求包括滿足水平航跡、垂直航跡、飛行程序、飛行計(jì)劃、保護(hù)區(qū)限制、地形障礙物避讓等要求。
飛行原理:
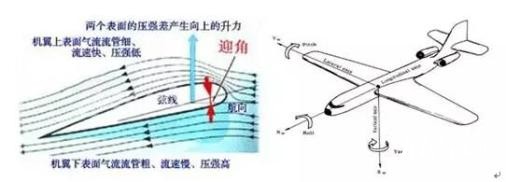 升力:升力是飛機(jī)上下表面的壓力差造成的,舉個(gè)例子就是一個(gè)快速流動(dòng)的河流,如果有人掉下去,那么立馬就會(huì)沖到中間去,為什么呢?因?yàn)橹虚g流速快,它的壓力就小,兩邊流速慢,壓力就大,它壓著你把你就壓到中間去了。飛機(jī)也一樣,由于機(jī)翼上下表面是壓力差,它設(shè)計(jì)的就是這樣運(yùn)行的;
升力:升力是飛機(jī)上下表面的壓力差造成的,舉個(gè)例子就是一個(gè)快速流動(dòng)的河流,如果有人掉下去,那么立馬就會(huì)沖到中間去,為什么呢?因?yàn)橹虚g流速快,它的壓力就小,兩邊流速慢,壓力就大,它壓著你把你就壓到中間去了。飛機(jī)也一樣,由于機(jī)翼上下表面是壓力差,它設(shè)計(jì)的就是這樣運(yùn)行的;
力矩平衡:在垂直方向就是升力與重力的平衡,水平方向就是拉力與阻力的平衡,但是飛機(jī)又不是個(gè)質(zhì)點(diǎn),它的平衡又沒(méi)那么簡(jiǎn)單,從樣子來(lái)看,它橫側(cè)和方向方面,你可以看見(jiàn)它是一個(gè)設(shè)計(jì)對(duì)稱的,這個(gè)平衡是沒(méi)問(wèn)題的,在縱向了一看他就是不對(duì)稱的,它的重心一般是在機(jī)身的前半部分,它的焦點(diǎn)又是機(jī)翼產(chǎn)生升力作用的中心叫焦點(diǎn),它一般在重心的后面,那這樣的話就會(huì)讓它有個(gè)低頭的傾向,為了保持它的平衡就設(shè)計(jì)了一個(gè)水平尾翼,讓它產(chǎn)生一個(gè)負(fù)力矩、負(fù)升力,讓它抬頭,這樣就平衡了;
穩(wěn)定性:飛機(jī)飛過(guò)去了我們一看就像射出的一個(gè)箭一樣,我們知道那個(gè)箭頭比較重然后尾巴有個(gè)垂直和水平的尾翼那么它射出去就會(huì)比較平直,如果要是沒(méi)有這樣一個(gè)設(shè)計(jì),你想射出一個(gè)筷子是什么感覺(jué),那肯定是風(fēng)一吹它就偏了,我們的飛機(jī)也這樣的,在水平方向了,我們有個(gè)機(jī)翼和水平尾翼能夠保持它的穩(wěn)定性,就像箭的箭尾,比如說(shuō)你受到一個(gè)擾動(dòng)使它抬頭了,迎角就變大了,那么機(jī)翼的升力也會(huì)變大,自然就會(huì)使它低頭,尾翼也是由于迎角變大,它本來(lái)是負(fù)的,現(xiàn)在變成零或者是正的了,那么它就會(huì)也是讓它低頭,兩個(gè)這樣的力矩就會(huì)讓它恢復(fù)原位.在方向控制這方面一個(gè)是機(jī)身一個(gè)是垂尾,如果機(jī)頭偏了那么機(jī)身和機(jī)尾會(huì)自然就讓它回正,在橫滾方向了,在我們飛機(jī)設(shè)計(jì)的時(shí)候就是一個(gè)下單翼的后掠角設(shè)計(jì),在受到一個(gè)擾動(dòng)發(fā)生左滾轉(zhuǎn)的話,那么左側(cè)機(jī)翼的升力就會(huì)變大,使它自動(dòng)回正,由于這個(gè)穩(wěn)定性的設(shè)計(jì),造成了一個(gè)荷蘭滾現(xiàn)象,比如說(shuō)你在做左滾轉(zhuǎn)的時(shí)候,自然會(huì)產(chǎn)生機(jī)頭的左偏,由于方向方面有一個(gè)平衡性,機(jī)頭應(yīng)該會(huì)擺正,那它就會(huì)產(chǎn)生一個(gè)震動(dòng)擺動(dòng),這個(gè)就是荷蘭滾,但我們飛機(jī)在設(shè)計(jì)的時(shí)候會(huì)規(guī)避這個(gè)荷蘭滾,首先是個(gè)大垂尾,然后再加了個(gè)偏航阻尼器,人工也是可以擺脫的,如果你左滾轉(zhuǎn)的話,那么就蹬左舵,使它頭不要擺正,
操縱性:操縱性和穩(wěn)定性是相反的,穩(wěn)定性越好,操縱性越差,在設(shè)計(jì)的時(shí)候會(huì)考慮到一個(gè)最優(yōu)值,同時(shí)我們?cè)谂漭d的時(shí)候會(huì)引起重心的前后變化,那這個(gè)時(shí)候要通過(guò)一個(gè)配平來(lái)改善我們的操縱性
指示空速:指示空速我們飛機(jī)上有個(gè)動(dòng)壓管,那個(gè)動(dòng)壓管就是測(cè)動(dòng)壓來(lái)指示空速的,他就假定那個(gè)密度ρ是恒定不變的,就是海平面那個(gè)ρ,根據(jù)升力公式我們可以推出了迎角與動(dòng)壓是成反比的,由于動(dòng)壓和指示空速又成正比那么這樣的話迎角和指示空速就成反比的,也就是說(shuō)在高度不變的時(shí)候,加速那么就要減小迎角,減速就要增大迎角,飛機(jī)的所有操控都是以指示空速為根本的,由指示空速我們就引出來(lái)失速的速度,由于一個(gè)迎角對(duì)應(yīng)一個(gè)速度,最大的迎角對(duì)應(yīng)的那個(gè)速度,就是失速速度,對(duì)一個(gè)C類飛機(jī)來(lái)說(shuō),一般它的入口速度也就是它的1.3倍的失速速度,還有它的起飛安全速度也是1.3倍的失速速度,大概在130到150節(jié)之間,起飛安全速度大是因?yàn)樗痫w重量大而導(dǎo)致的,根據(jù)這個(gè)數(shù)值我們可以算出來(lái),大概一個(gè)C類飛機(jī)的失速速度是在115節(jié)左右,所以任何時(shí)候飛行員都不能低于這個(gè)指示空速來(lái)飛行,飛行員最重要的事情就是保持指示空速,然后由指示空速對(duì)應(yīng)一個(gè)姿態(tài),同時(shí)在低速的時(shí)候,大坡度盤旋會(huì)對(duì)失速速度造成影響,增加它的失速速度,所以要更加注意。
休息5秒鐘,插播一則廣告!
還想了解更多飛機(jī)?
《航空知識(shí)》資深編輯傾力編譯
《飛機(jī)全書(shū)》你值得擁有,點(diǎn)擊圖片即可購(gòu)買
飛行各階段操縱要求:
 首先是在起飛爬升階段,在起飛的時(shí)候我們計(jì)算機(jī)要算出來(lái)一個(gè)決斷速度V1,抬輪速度V2,還有起飛安全速度VR,也就是1.3倍的失速速度,我們飛機(jī)在離地的時(shí)候,由于地面摩擦的突然減小那么它俯仰的配平就會(huì)打破,機(jī)頭自然就有一個(gè)上仰的過(guò)程,那么這時(shí)候需要一個(gè)壓桿,當(dāng)我們飛機(jī)出現(xiàn)一個(gè)正的上升力的時(shí)候就需要收輪了,當(dāng)飛機(jī)的速度達(dá)到了V2加10節(jié)的時(shí)候,就要保持這樣一個(gè)速度,進(jìn)行一個(gè)大坡度的爬升,這個(gè)保持速度爬升的好處就是不用干預(yù)它的俯仰平衡了,一般如果沒(méi)有近的障礙物的話,會(huì)在400英尺的時(shí)候改平,然后加速到綠點(diǎn)速度,在加速的過(guò)程中會(huì)有一個(gè)收襟翼速度指示,逐漸把襟翼收光。如果有近的障礙物,要在1000英尺的時(shí)候改平加速到綠點(diǎn)速度,在10000英尺以下了就保持這個(gè)綠點(diǎn)速度進(jìn)行爬升或者在250節(jié)以內(nèi),然后就到了巡航階段,巡航階段首先是計(jì)算機(jī)計(jì)算出來(lái)一個(gè)最經(jīng)濟(jì)的速度,這個(gè)最經(jīng)濟(jì)的速度就是又省時(shí),又省油,就像我們的汽車在90公里的時(shí)候是最省油的,但是我們一般會(huì)抬到120因?yàn)槲覀兊臅r(shí)間也是成本,那么飛機(jī)也是綠點(diǎn)速度應(yīng)該是比較省油的速度,但是最經(jīng)濟(jì)的速度應(yīng)該是1.3倍的綠點(diǎn)速度,計(jì)算出這樣一個(gè)速度以后,我們的飛機(jī)首先加速到一個(gè)經(jīng)濟(jì)速度,然后保持這個(gè)速度進(jìn)行爬升,爬升到我們要求的高度,這樣爬升的好處還是姿態(tài)比較穩(wěn)定,由于高空空氣比較稀薄,密度比較小,那么它的真空速度跟密度相對(duì)應(yīng)的,那么真空速度就會(huì)很大,我們指示空速一般在高空也就290或者300節(jié)左右,但是真空速度可以達(dá)到400多,馬赫數(shù)可以達(dá)到0.78至0.82之間,由于這馬赫數(shù)比較大了就會(huì)產(chǎn)生一個(gè)激波,會(huì)使我們的焦點(diǎn)后移,這個(gè)時(shí)候還需要一個(gè)馬赫配平。然后就是到了進(jìn)近和著陸階段,首先是速度降到一定程度的時(shí)候就可以逐漸放襟翼,放起落架,然后切盲降,到?jīng)Q斷高度的時(shí)候切斷自動(dòng)駕駛儀,然后逐漸的把油門收光,收油門的過(guò)程中由于推力的變小,它自然有個(gè)低頭的動(dòng)作,俯仰配平自然會(huì)低頭嘛,然后我們就逐漸的帶點(diǎn)桿,直到飛機(jī)接地,由于地面受到一個(gè)大的摩擦,機(jī)頭會(huì)有個(gè)下仰下浮的動(dòng)作,我們就要帶點(diǎn)桿。
首先是在起飛爬升階段,在起飛的時(shí)候我們計(jì)算機(jī)要算出來(lái)一個(gè)決斷速度V1,抬輪速度V2,還有起飛安全速度VR,也就是1.3倍的失速速度,我們飛機(jī)在離地的時(shí)候,由于地面摩擦的突然減小那么它俯仰的配平就會(huì)打破,機(jī)頭自然就有一個(gè)上仰的過(guò)程,那么這時(shí)候需要一個(gè)壓桿,當(dāng)我們飛機(jī)出現(xiàn)一個(gè)正的上升力的時(shí)候就需要收輪了,當(dāng)飛機(jī)的速度達(dá)到了V2加10節(jié)的時(shí)候,就要保持這樣一個(gè)速度,進(jìn)行一個(gè)大坡度的爬升,這個(gè)保持速度爬升的好處就是不用干預(yù)它的俯仰平衡了,一般如果沒(méi)有近的障礙物的話,會(huì)在400英尺的時(shí)候改平,然后加速到綠點(diǎn)速度,在加速的過(guò)程中會(huì)有一個(gè)收襟翼速度指示,逐漸把襟翼收光。如果有近的障礙物,要在1000英尺的時(shí)候改平加速到綠點(diǎn)速度,在10000英尺以下了就保持這個(gè)綠點(diǎn)速度進(jìn)行爬升或者在250節(jié)以內(nèi),然后就到了巡航階段,巡航階段首先是計(jì)算機(jī)計(jì)算出來(lái)一個(gè)最經(jīng)濟(jì)的速度,這個(gè)最經(jīng)濟(jì)的速度就是又省時(shí),又省油,就像我們的汽車在90公里的時(shí)候是最省油的,但是我們一般會(huì)抬到120因?yàn)槲覀兊臅r(shí)間也是成本,那么飛機(jī)也是綠點(diǎn)速度應(yīng)該是比較省油的速度,但是最經(jīng)濟(jì)的速度應(yīng)該是1.3倍的綠點(diǎn)速度,計(jì)算出這樣一個(gè)速度以后,我們的飛機(jī)首先加速到一個(gè)經(jīng)濟(jì)速度,然后保持這個(gè)速度進(jìn)行爬升,爬升到我們要求的高度,這樣爬升的好處還是姿態(tài)比較穩(wěn)定,由于高空空氣比較稀薄,密度比較小,那么它的真空速度跟密度相對(duì)應(yīng)的,那么真空速度就會(huì)很大,我們指示空速一般在高空也就290或者300節(jié)左右,但是真空速度可以達(dá)到400多,馬赫數(shù)可以達(dá)到0.78至0.82之間,由于這馬赫數(shù)比較大了就會(huì)產(chǎn)生一個(gè)激波,會(huì)使我們的焦點(diǎn)后移,這個(gè)時(shí)候還需要一個(gè)馬赫配平。然后就是到了進(jìn)近和著陸階段,首先是速度降到一定程度的時(shí)候就可以逐漸放襟翼,放起落架,然后切盲降,到?jīng)Q斷高度的時(shí)候切斷自動(dòng)駕駛儀,然后逐漸的把油門收光,收油門的過(guò)程中由于推力的變小,它自然有個(gè)低頭的動(dòng)作,俯仰配平自然會(huì)低頭嘛,然后我們就逐漸的帶點(diǎn)桿,直到飛機(jī)接地,由于地面受到一個(gè)大的摩擦,機(jī)頭會(huì)有個(gè)下仰下浮的動(dòng)作,我們就要帶點(diǎn)桿。
自動(dòng)駕駛能做什么,作用是什么,對(duì)飛行的促進(jìn)意義、影響
自動(dòng)駕駛能夠提供飛機(jī)的自動(dòng)導(dǎo)航、自動(dòng)飛行、自動(dòng)推力、限制與保護(hù)功能,在飛機(jī)起飛后一直到落地前決斷高度前(一般60米)在正常情況下可全程實(shí)現(xiàn)自動(dòng)駕駛,通過(guò)自動(dòng)駕駛飛行員把常規(guī)符合飛行原理和導(dǎo)航原理的操縱交給自動(dòng)駕駛,大大減小了工作負(fù)荷,可以留出更多時(shí)間讓飛行員監(jiān)控飛機(jī)狀態(tài)、觀察運(yùn)行環(huán)境、處置突發(fā)一般情況、提高飛行效率、節(jié)約飛行成本。在重大系統(tǒng)故障、飛機(jī)結(jié)構(gòu)嚴(yán)重受損,傳感器失效、積冰、失去平衡、失速、與其他航空器危險(xiǎn)接近、地形告警、雷雨繞飛、風(fēng)切變?cè)摮?、緊急上升或下降、機(jī)動(dòng)飛行、強(qiáng)烈顛簸等情況發(fā)生時(shí)需要立即人工干預(yù)。
自動(dòng)駕駛對(duì)飛行員的影響,過(guò)度依賴的后果,會(huì)不會(huì)影響關(guān)鍵時(shí)刻的判斷力
對(duì)自動(dòng)駕駛的依賴會(huì)使飛行員逐步喪失很多飛行技能,一個(gè)囚犯如果被關(guān)閉在一個(gè)獨(dú)立的房間禁止與人說(shuō)話,那么一段時(shí)間后他將喪失說(shuō)話能力,連說(shuō)話這種我們認(rèn)為是想當(dāng)然的能力都會(huì)喪失,更何況飛行技能,同時(shí)許多關(guān)鍵的判斷只有做出創(chuàng)造性判斷才能妥善處置,而自動(dòng)駕駛最不擅長(zhǎng)的就是創(chuàng)造性判斷。自動(dòng)駕駛僅類似與人的潛意識(shí)的功能,而自動(dòng)駕駛不具備人的主觀意識(shí)功能,這也是當(dāng)前階段自動(dòng)駕駛最致命的缺陷,但人的主觀意識(shí)也經(jīng)常收到環(huán)境壓力、生理和心理上的影響,同樣不靠譜,最優(yōu)秀的飛行員應(yīng)該是既懂得充分利用自動(dòng)駕駛和潛意識(shí),也會(huì)在關(guān)鍵時(shí)刻發(fā)揮主觀意識(shí)的作用,同時(shí)能避免受到干擾,具體可以參考“華晨不是BMW”民航資源網(wǎng)博客文章“從潛意識(shí)層面看自動(dòng)駕駛依賴癥”。
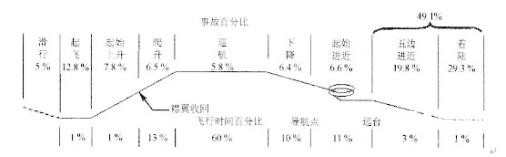
隨著飛機(jī)可靠性的提高和導(dǎo)航技術(shù)的提升要求在PBN航路和RVSM空域由于控制精度的要求必須使用自動(dòng)駕駛,自動(dòng)駕駛使用時(shí)間日益增加,造成許多飛行員的基本飛行技能長(zhǎng)期不能得到使用,在自動(dòng)駕駛故障或特情發(fā)生時(shí)容易釀成大禍。比如說(shuō),在飛由塔臺(tái)雷達(dá)引導(dǎo)的非標(biāo)準(zhǔn)進(jìn)近程序時(shí),國(guó)內(nèi)外頻頻出現(xiàn)地形警告和落錯(cuò)跑道的事件,這是由于之前飛行流量小的時(shí)候,一般按照標(biāo)準(zhǔn)飛行程序進(jìn)近,這就造成飛行員長(zhǎng)期依賴自動(dòng)導(dǎo)航,逐漸喪失對(duì)地形了解和方位的辨識(shí)能力,到了今天,航班流量大增,多跑道多機(jī)場(chǎng)運(yùn)行逐漸成為新常態(tài),管制員必須頻繁進(jìn)行雷達(dá)引導(dǎo),在偏離了預(yù)定路線后,加上飛行員原有能力的喪失,就很容易觸發(fā)地形警告和落錯(cuò)跑道。還有最近發(fā)生的亞航飛機(jī)進(jìn)入雷暴云區(qū)墜毀事故,這個(gè)很像當(dāng)年法航447航班的情形,調(diào)查顯示法航飛機(jī)進(jìn)入雷暴云后,空速管探頭積冰后失效,飛行員在失去速度和高度參考后完全迷失,飛機(jī)墜毀。其實(shí)從理論是完全可以避免此次空難的,飛行員可以憑借飛機(jī)內(nèi)部的陀螺儀和加速度計(jì)獲取飛機(jī)的姿態(tài)信息和升降速度信息,從而保持平飛,在飛出云區(qū)后,通過(guò)傳感器探頭加溫重新恢復(fù)速度高度指示,恢復(fù)正常飛行。去年韓亞航空777飛機(jī)在飛抵洛杉磯機(jī)場(chǎng)的時(shí)候自動(dòng)油門出現(xiàn)了故障,在座的777機(jī)長(zhǎng)眼看著飛機(jī)嚴(yán)重低于下滑道并且接近失速速度,也沒(méi)有進(jìn)行積極的干預(yù),最終導(dǎo)致了飛機(jī)在降落過(guò)程中機(jī)尾撞了防波堤致使一起空難的發(fā)生,之后FAA的調(diào)查結(jié)果就表明飛行員過(guò)度依賴于自動(dòng)駕駛。其次是華航006航班的事件,747飛機(jī)在3萬(wàn)英尺的時(shí)候,突然有一臺(tái)發(fā)動(dòng)機(jī)發(fā)生了故障,飛機(jī)發(fā)生了側(cè)滑,飛行員也是相信自動(dòng)駕駛沒(méi)有進(jìn)行人工干預(yù),飛機(jī)急速降高度,好在是最后飛行員脫開(kāi)自動(dòng)駕駛進(jìn)行人工干預(yù)把飛機(jī)在1萬(wàn)英尺改平。前不久的臺(tái)灣復(fù)興航空關(guān)錯(cuò)發(fā)動(dòng)機(jī)墜毀事件也可能與自動(dòng)駕駛依賴癥有關(guān),不但關(guān)錯(cuò)了發(fā)動(dòng)機(jī),空中重新啟動(dòng)發(fā)動(dòng)機(jī)的程序也未必正確,連一個(gè)最基本的開(kāi)關(guān)發(fā)動(dòng)機(jī)的程序都會(huì)弄錯(cuò),這個(gè)不能簡(jiǎn)單歸因于技術(shù)問(wèn)題或是個(gè)人主觀意識(shí)問(wèn)題。
 自動(dòng)駕駛的發(fā)展趨勢(shì),民航客機(jī)能否實(shí)現(xiàn)無(wú)人駕駛
自動(dòng)駕駛的發(fā)展趨勢(shì),民航客機(jī)能否實(shí)現(xiàn)無(wú)人駕駛
駕駛艙設(shè)計(jì)原理(具體可以參見(jiàn)“華晨不是BMW”民航資源網(wǎng)博客文章“小駕艙、大世界”)
人
責(zé)任區(qū)域分工,交叉檢查,標(biāo)準(zhǔn)喊話,起飛進(jìn)近簡(jiǎn)令,訓(xùn)練
機(jī)
桿、舵、配平,電子控制面板,飛行顯示器、導(dǎo)航顯示器
料
MCDU(多功能控制顯示組件),飛行計(jì)劃、氣象信息、配載信息、性能信息輸入
法
FCOM、SOP、QRH,航行資料、性能手冊(cè),飛行運(yùn)行總手冊(cè)
環(huán)
人性化黑暗安靜駕駛艙原理,“聲、光、電、動(dòng)”電子顯示和警告信息,系統(tǒng)狀態(tài)與警告顯示器
 現(xiàn)代駕駛艙的設(shè)計(jì)已經(jīng)為進(jìn)一步的自動(dòng)化奠定了基礎(chǔ),原理上在正常情況下,不需要做出創(chuàng)造性或復(fù)雜的判斷時(shí),駕駛艙的一切動(dòng)作都可以實(shí)現(xiàn)自動(dòng)化。
現(xiàn)代駕駛艙的設(shè)計(jì)已經(jīng)為進(jìn)一步的自動(dòng)化奠定了基礎(chǔ),原理上在正常情況下,不需要做出創(chuàng)造性或復(fù)雜的判斷時(shí),駕駛艙的一切動(dòng)作都可以實(shí)現(xiàn)自動(dòng)化。
比如說(shuō),在操作方面的我們從發(fā)動(dòng)機(jī)啟動(dòng)開(kāi)始一直到駕駛桿的操作,直到各類電子控制面板的接通、斷開(kāi)和選擇都是人工操作的,如果這個(gè)過(guò)程將操作手冊(cè)和sop以及檢查單作為一個(gè)電子包和一個(gè)邏輯來(lái)錄入計(jì)算機(jī),那么計(jì)算機(jī)完全可以代替人工來(lái)實(shí)施一般操作。
其次是目前飛機(jī)起飛之前和在航路飛行過(guò)程中的一些數(shù)據(jù)獲取與分析,比如說(shuō)氣象、航行資料、通告、配載、飛行計(jì)劃等目前都是是人工完成的。這些也可以做成一個(gè)數(shù)據(jù)包,進(jìn)入計(jì)算機(jī)系統(tǒng),計(jì)算機(jī)完全有能力分析這些數(shù)據(jù),減少了很多外圍單位人工提供的服務(wù),其次讓再看看故障處理,在飛行中飛行員遇到故障往往是通過(guò)QRH手冊(cè)來(lái)進(jìn)行處置操作,同樣我們把QRH以及排故的操作手冊(cè),作為一種計(jì)算機(jī)可以讀懂的語(yǔ)言,錄入到計(jì)算機(jī)模塊當(dāng)中,那么在發(fā)生小故障的時(shí)候,計(jì)算機(jī)除了擁有備份系統(tǒng)以外,它又能讀懂這些排故手冊(cè),似乎實(shí)現(xiàn)計(jì)算機(jī)自動(dòng)處理小故障也是可行的。飛機(jī)系統(tǒng)都是多備份的,它完全可以自動(dòng)轉(zhuǎn)換到一個(gè)好的通道上來(lái)??罩羞€有一些預(yù)警處理,比如說(shuō)雷達(dá)氣象預(yù)警,風(fēng)切變預(yù)警,地形預(yù)警,構(gòu)型預(yù)警 ,空中交通警戒,但在目前的狀態(tài)下它只是提供這種警戒,不自動(dòng)處理。計(jì)算機(jī)完全可以自動(dòng)避讓,自動(dòng)改出風(fēng)切變,另外一個(gè)需要人工干預(yù)的就是空管信息,我們知道空管要提供放行許可,如果這種放行許可也可以成為電子數(shù)據(jù),傳于計(jì)算機(jī)當(dāng)中,那么空管這部分的人工干預(yù),也可以由計(jì)算機(jī)來(lái)自動(dòng)完成。
目前谷歌公司已經(jīng)成功完成無(wú)人駕駛汽車的30萬(wàn)公里測(cè)試,它是基于大數(shù)據(jù)后臺(tái)運(yùn)算的人工智能服務(wù),對(duì)于飛機(jī)來(lái)說(shuō)盡管也可以如此,但飛機(jī)由于懸浮在空中發(fā)生任何緊急情況都不允許它暫且停留在空中某個(gè)位置,所以它對(duì)于人工智能的要求會(huì)更高一級(jí),目前FAA推出了一個(gè)民航客機(jī)在10年內(nèi)實(shí)現(xiàn)單人駕駛的計(jì)劃,并且地面配備有副駕駛對(duì)飛機(jī)進(jìn)行監(jiān)控,以免在機(jī)組失能或判斷錯(cuò)誤時(shí)接替或者提醒,這個(gè)計(jì)劃是比較現(xiàn)實(shí)的。
 實(shí)現(xiàn)無(wú)人駕駛的最后障礙就是人工智能要具備不斷自我更新和不斷打破常規(guī)的能力,如果實(shí)現(xiàn)了這點(diǎn)民航客機(jī)的無(wú)人駕駛將徹底實(shí)現(xiàn),但人工智能具備了這項(xiàng)能力之后,也可能是人類的一場(chǎng)災(zāi)難。
實(shí)現(xiàn)無(wú)人駕駛的最后障礙就是人工智能要具備不斷自我更新和不斷打破常規(guī)的能力,如果實(shí)現(xiàn)了這點(diǎn)民航客機(jī)的無(wú)人駕駛將徹底實(shí)現(xiàn),但人工智能具備了這項(xiàng)能力之后,也可能是人類的一場(chǎng)災(zāi)難。
比較可能的一種形式就是像軍用無(wú)人機(jī)那樣,比如說(shuō)中國(guó)的無(wú)人機(jī)翼龍,正常情況下翼龍是自己在飛的,如果出現(xiàn)一些特殊情況或者飛機(jī)操縱不了的,下面有個(gè)人,有個(gè)駕駛桿,有個(gè)顯示屏,進(jìn)行一個(gè)人工操縱,相當(dāng)于遙控飛機(jī)一樣,但是能夠直觀的顯示。






















