


雷達的基本概念
雷達是一個熟悉又陌生的詞,是英文Radar的音譯,源于radio detection and ranging的縮寫,意思為"無線電探測和測距",即用無線電的方法發現目標并測定它們的空間位置。因此,雷達也被稱為“無線電定位”。雷達是利用電磁波探測目標的電子設備。雷達發射電磁波對目標進行照射并接收其回波,由此獲得目標至電磁波發射點的距離、距離變化率(徑向速度)、方位、高度等信息。
什么是毫米波雷達
首先我們要明白啥是毫米波,毫米波實質上就是電磁波。毫米波的頻段比較特殊,其頻率高于無線電,低于可見光和紅外線,頻率大致范圍是10GHz—200GHz。這是一個非常適合車載領域的頻段。目前,比較常見的車載領域的毫米波雷達頻段有三類。
1、24GHz,這個頻段目前大量應用于汽車的盲點監測、變道輔助。雷達安裝在車輛的后保險杠內,用于監測車輛后方兩側的車道是否有車、可否進行變道。這個頻段也有其缺點,首先是頻率比較低,另外就是帶寬比較窄,只有250MHz。
2、77GHz,這個頻段的頻率比較高,國際上允許的帶寬高達800MHz。據介紹,這個頻段的雷達性能要好于24GHz的雷達,所以主要用來裝配在車輛的前保險杠上,探測與前車的距離以及前車的速度,實現的主要是緊急制動、自動跟車等主動安全領域的功能。
3、79GHz,這個頻段最大的特點就是其帶寬非常寬,要比77GHz的高出3倍以上,這也使其具備非常高的分辨率,可以達到125px。
原理:振蕩器會產生一個頻率隨時間逐漸增加的信號,這個信號遇到障礙物之后,會反彈回來,其時延是2倍距離/光速。返回來的波形和發出的波形之間有個頻率差,這個頻率差和時延是呈線性關系的:物體越遠,返回的波收到的時間就越晚,那么它跟入射波的頻率差值就越大。將這兩個頻率做一個減法,就可以得到二者頻率的差頻,通過判斷差拍頻率的高低就可以判斷障礙物的距離。
毫米波雷達特點
精準度高,抗干擾能力強 探測距離遠 ,呈廣角探測 ,探測范圍廣,作用時速可達到120碼以上,全天候工作,雨雪霧霾沙塵暴等惡劣天氣,均能開啟正常使用。穿透能力強,安裝也可以完全隱蔽,不影響車輛整體外觀。因此毫米波雷達技術更適用于汽車防撞領域。
什么是激光雷達
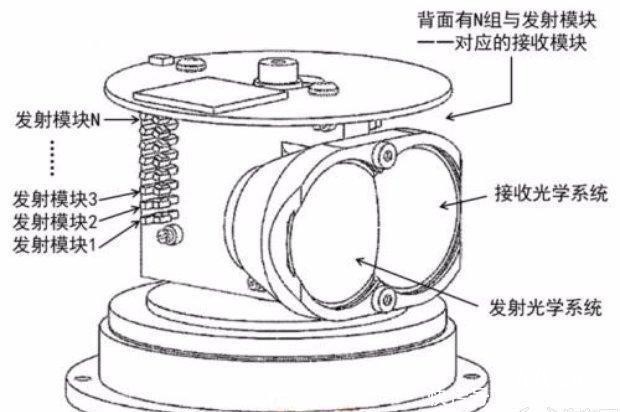
激光雷達,是以發射激光束探測目標的位置、速度等特征量的雷達系統。其工作原理是向目標發射探測激光信號,然后將接收到的從目標反射回來的信號與發射信號進行比較,作適當處理后,就可獲得目標的有關信息,如目標距離、方位、高度、速度、姿態、甚至形狀等參數,從而對飛機、導彈等目標進行探測、跟蹤和識別。它由激光發射機、光學接收機、轉臺和信息處理系統等組成,激光器將電脈沖變成光脈沖發射出去,光接收機再把從目標反射回來的光脈沖還原成電脈沖,送到顯示器。
激光雷達的工作原理與雷達非常相近,以激光作為信號源,由激光器發射出的脈沖激光,打到地面的樹木、道路、橋梁和建筑物上,引起散射,一部分光波會反射到激光雷達的接收器上,根據激光測距原理計算,就得到從激光雷達到目標點的距離,脈沖激光不斷地掃描目標物,就可以得到目標物上全部目標點的數據,用此數據進行成像處理后,就可得到精確的三維立體圖像。
激光雷達最基本的工作原理與無線電雷達沒有區別,即由雷達發射系統發送一個信號,經目標反射后被接收系統收集,通過測量反射光的運行時間而確定目標的距離。至于目標的徑向速度,可以由反射光的多普勒頻移來確定,也可以測量兩個或多個距離,并計算其變化率而求得速度,這是、也是直接探測型雷達的基本工作原理。
激光雷達特點
精度高,穩定性強。但是激光雷達通過發射光束進行探測因此探測范圍窄,光束受遮擋后就無法正常使用,因此在雨雪霧霾天,沙塵暴等惡劣天氣不能開啟,受環境影響大。并且沒有穿透能力,探頭必須完全外露才能達到探測效果,對于安裝車輛來說影響車輛外形美觀。因此,激光雷達防撞器在使用過程中局限性較大。
毫米波雷達和激光雷達的區別
毫米波雷達從上世紀起就已在高檔汽車中使用,技術相對成熟。毫米波的波長介于厘米波和光波之間,因此毫米波兼有微波制導和光電制導的優點,且其引導頭具有體積小、質量輕和空間分辨率高的特點。此外,毫米波導引頭穿透霧、煙、灰塵的能力強,相比于激光雷達是一大優勢。毫米波雷達的缺點也十分直觀,探測距離受到頻段損耗的直接制約,想要探測的遠,就必須使用高頻段雷達。而且也無法感知行人,并且對周邊所有障礙物無法進行精準的建模。
而激光雷達主要是通過發射激光束來探測周遭環境,車載激光雷達普遍采用多個激光發射器和接收器,建立三維點云圖,從而達到實時環境感知的目的。技術上來講,目前傳統激光雷達技術已經很成熟,而固態激光雷達和混合固態激光雷達尚處于起步階段,因此各企業當前在自動駕駛汽車使用的激光雷達,多以機械式激光雷達為主。激光雷達的優勢在于其探測范圍更廣,探測精度更高。但是,激光雷達的缺點也很明顯:在雨雪霧等極端天氣下性能較差;采集的數據量過大;十分昂貴。
寫在最后
經過詳細的解讀,大家不難發現兩種雷達對于自動駕駛都起著重大的作用,雖然自身都有著不同的優缺點,單獨工作也很難完成自動駕駛任務。但是兩者結合卻很好的彌補了對方的缺點。相信在不久的將來兩種雷達會同時出現在自動駕駛汽車上。






















