近段時間以來,國內車企關于無人駕駛汽車的研發和測試捷報頻傳。先是吉利汽車宣布將在2022年亞運舉辦期間,在特定區域內使用完全無人駕駛的車輛。隨后再有報道稱,百度宣稱其新一代無人巴士車阿波龍二代將很快推出。
而就在不久前,百度與中國一汽紅旗共同打造的國內首批量產自動駕駛出租車在湖南長沙展開了上路測試。有消息稱,長沙市民有望在年底之前率先體驗到中國首批自動駕駛出租車。 無疑無人駕駛技術是一種解放人類雙手和提高生產力效率的科技創新。

本文小編將著重介紹激光雷達傳感器在無人駕駛中的作用及市場趨勢。
無人駕駛的底層支撐可以分為三部分,即:傳感器、高精地圖和計算平臺。在傳感器方面,主流的傳感器分為:毫米波雷達、激光雷達和攝像頭。其作用如下:
攝像頭:直接識別可見光,價格適中,技術成熟,可以識別行人、車輛、路標等物體,但易受視野、夜晚暗光、雨雪天氣等因素影響。
激光雷達:探測角度廣,精度高,厘米級精度的激光雷達結合高精地圖可以實現高精度自定位和物體識別跟蹤,定位可以精確到具體車道,但是價格昂貴,使用壽命較短。
毫米波雷達:測距離遠,可以在雨雪天氣等各種惡劣環境中穩定工作,但是精度不高。
無人駕駛用于控制的傳感器要么是攝像頭,要么是激光雷達,這是業界已經達成的共識。那何謂激光雷達?在無人機駕駛中的作用是什么?
激光雷達的工作原理是利用可見和近紅外光波(多為950nm波段附近的紅外光)發射、反射和接收來探測物體。激光雷達可以探測白天或黑夜下的特定物體與車之間的距離。由于反射度的不同,也可以區分開車道線和路面,但是無法探測被遮擋的物體、光束無法達到的物體,在雨雪霧天氣下性能較差。
激光雷達在無人駕駛運用中擁有兩個核心作用。3D建模進行環境感知。通過雷射掃描可以得到汽車周圍環境的3D模型,運用相關算法比對上一幀和下一幀環境的變化可以較為容易的探測出周圍的車輛和行人。
激光雷達在無人駕駛中的具體應用
1.定位
定位在無人駕駛中十分鐘重要,只有有了實時的位置信息,系統才能做出下一步判讀,決定向何處進發,以及如何前往。
現在定位的方式有許多種。如載波相位差分技術(RTK),但 RTK 還是會受信號的干擾。特別是在一些城市、建筑和樹比較多的地方,以及進隧道、出隧道,它的信號容易中斷。同時,也有用攝像頭等傳感器感知外部環境、構建環境模型并利用該模型確定車輛所在的位置的方式,但其對環境的依賴比較強,比如逆光或雨雪天氣下,這種定位容易失效。
而激光雷達是依靠將車輛的初始位置與高精地圖信息進行比對來獲得精確位置。
首先,GPS、IMU和輪速等傳感器給出一個初始(大概)的位置。其次,將激光雷達的局部點云信息進行特征提取,并結合初始位置獲得全局坐標系下的矢量特征。
最后,將上一步的矢量特征跟高精地圖的特征信息進行匹配,得出精確的全球定位。所以,在定位方面,無論是從精度上還是穩定性上來說,運用激光雷達都有無可比擬的優勢。
而其唯一的缺點便在于目前激光雷達的生產成本較高,另一方面往固態方向上進行技術創新,朝著固態的低成本和可量產化的方向去發展,許多國內外廠家都在加速創新,在不久的將來成本將不會成為一個十分棘手的問題。
2. 障礙物的檢測和分類
對于障礙物檢測和分類來講,目前有應用視覺和激光雷達,這兩者并沒有沖突。激光雷達不依賴光照,它的視角是 360 度,計算量比較小,可以實時掃描,目前普遍用的是 100 毫秒以內的。
激光雷達在掃描的過程中,先識別障礙物,知道這個障礙物在空間中的位置,再根據存在的障礙物做分類。比如車、人,我們將這些障礙物分割成為獨立的個體,通過分割出來獨立的個體再去匹配,從而進行障礙物的分類和物體的跟蹤。
而跟蹤的過程,首先是分割點云,通過點云做關聯目標,我們知道上一楨和下一楨是否屬于同一個物體,再進行目標跟蹤,輸出目標跟蹤信息。
3.用于先進駕駛輔助系統(ADAS)
先進駕駛輔助系統(Advanced Driver Assistance System),簡稱ADAS,是利用安裝于車上的各式各樣的傳感器, 在第一時間收集車內外的環境數據, 進行靜、動態物體的辨識、偵測與追蹤等技術上的處理, 從而能夠讓駕駛者在最快的時間察覺可能發生的危險, 以引起注意和提高安全性的主動安全技術。
如果激光雷達能有效控制成本,ADAS等級數較低的駕駛輔助功能也需要用激光雷達。其原因在于,基于攝像頭的ADAS和無人駕駛系統,或者單獨使用毫米波的局限性很大。
首先是視場角的問題,為了保證足夠的探測距離,視場角的角度不可太大,而這就導致車輛有非常大的橫向盲區。對此現象,有些公司設計了多攝像頭來解決此類問題,但效果并不理想,同樣的多目攝像頭會有重疊區域,還會增加處理數據的難度。
其次是低速問題,事實證明,在低速情況下,攝像頭的表現不盡人意,甚至對一下移動緩慢或靜止的目標都很難識別。所以激光雷達在ADAS方面有著很大的潛力。
激光雷達的行業趨勢
市場需求:L3級以上無人駕駛的必備傳感器
激光雷達是高精度的傳感器,但是有與過于昂貴,無人駕駛業界對激光雷達的存廢之爭一直沒有停止過。
非激光雷達陣營主要是以特斯拉為代表的的傳統車企,他們傾向于漸進式路線,從ADAS輔助駕駛逐漸升級過度到自動駕駛,以端到端的深度學習砍掉傳統的激光雷=雷達,激光雷大陣營主要是以谷歌為代表的科技公司,他們傾向于一步到位路線,以激光雷達為主傳感器,等技術方案成熟成本下降后,再大規模商用。
未來發展方向:固態激光雷達
Velodyne是激光雷達的鼻祖,先后推出了64線、32線機械式激光雷達和16線混合固態激光雷達。“混合固”為Velodyne首創概念,是指外形上不存在可見的旋轉部件,但為了360全視角其內部實際上仍然存在一些機械式旋轉部件,只是做的非常小巧可以內藏而已。下面小編簡單介紹一下固態激光雷達探測原理:TOF飛行時間法原理如下圖:
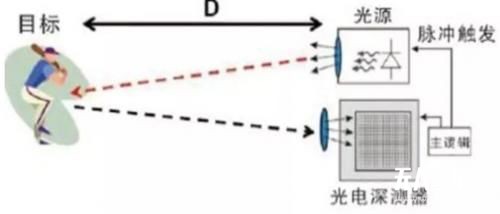
激光雷達常用的探測原理是飛行時間法,就是通過給目標連續發送光脈沖,然后用傳感器接收從物體返回的光,通過探測光脈沖的飛行往返時間來得到目標物距離。
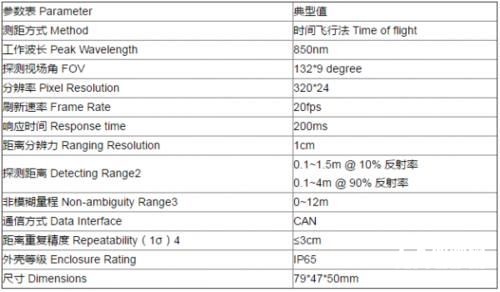
對于固態激光雷達產品的應用工采網提供一款固態面陣激光雷達測距傳感器 - CE30-A,CE30 使用時間飛行法(TOF, Time of Flight)進行測距,它會發射出經過調制的近紅外光,光線遇物體后反射并再次被 CE30 接收。CE30 通過計算光線發射和接收的相位差與時間差,來換算被拍攝景物的距離。
固態面陣激光雷達 測距傳感器 CE30-A 參數: