


日前,華為技術(shù)有限公司一項名為“自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器”的發(fā)明專利獲得授權(quán)。該專利可實現(xiàn)全天候全路況的自動駕駛導(dǎo)航。
專利摘要顯示,本發(fā)明采用基于無線網(wǎng)絡(luò)輔助的衛(wèi)星差分定位技術(shù),實現(xiàn)了全天候全路況的自動駕駛導(dǎo)航,且定位精度無需依賴于3D高精度地圖,方案的適應(yīng)性和可靠性顯著增加。
華為“自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器”專利獲授權(quán)
專利中提到的自動駕駛導(dǎo)航方法包括:
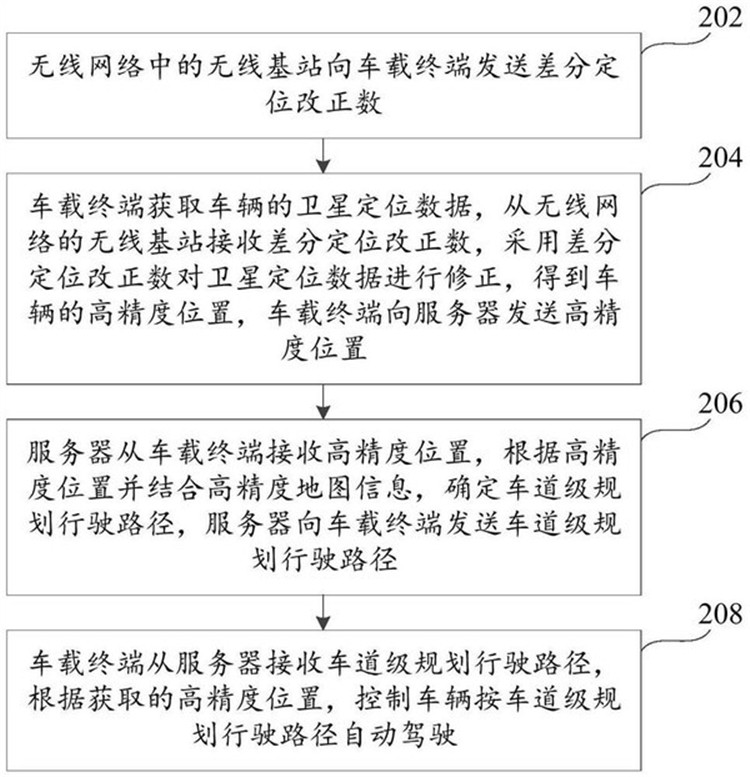
無線網(wǎng)絡(luò)中的無線基站向車載終端發(fā)送差分定位改正數(shù)(202);
車載終端獲取車輛的衛(wèi)星定位數(shù)據(jù),從無線網(wǎng)絡(luò)的無線基站接收差分定位改正數(shù),采用差分定位改正數(shù)對衛(wèi)星定位數(shù)據(jù)進行修正,得到車輛的高精度位置,車載終端向服務(wù)器發(fā)送高精度位置(204);
服務(wù)器從車載終端接收高精度位置,根據(jù)高精度位置并結(jié)合高精度地圖信息,確定車道級規(guī)劃行駛路徑,服務(wù)器向車載終端發(fā)送車道級規(guī)劃行駛路徑(206);
車載終端從服務(wù)器接收車道級規(guī)劃行駛路徑,根據(jù)獲取的高精度位置,控制車輛按車道級規(guī)劃行駛路徑自動駕駛(208)。

華為“自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器”專利獲授權(quán)
企查查內(nèi)容顯示,早在2015年11月30日,華為就已申請“自動駕駛導(dǎo)航方法、裝置、系統(tǒng)、車載終端及服務(wù)器”專利,該專利于2018年5月11日公開,于2021年6月1日獲得授權(quán)。






















