



供司機使用的傳統(tǒng)地圖,有導航、路徑規(guī)劃、擁堵提示的功能就足夠了。但是在駕駛過程中,人腦能輕易完成的聯(lián)想、識別、判斷路況等工作,對于目前的無人車而言卻非常困難。因此,供無人車使用的高精度地圖就需要具備車道級的引導能力,幫助無人車“上道”。
高精度地圖不僅需要描述出精細的車道標線、變道參考線以及彎道的起止位置等路面屬性要素,還需要盡量完整還原道路現(xiàn)場情況,在三維空間里描述現(xiàn)實世界。一旦地圖出現(xiàn)誤差,或者更新不及時,就可能直接干擾無人車的行駛安全。
一直以來,為現(xiàn)實中存在的路段繪制高精度地圖都是一個耗時耗力的工作,如何利用機器學習框架加速地圖繪制,也成了無人駕駛公司角力的重頭戲。利用機器學習開源框架 TensorFlow,數(shù)字地圖提供商四維圖新將高精度地圖的人工率降低到了 30%,做到了從原始數(shù)據(jù)中自動識別地圖要素,生成地圖。
什么是高精度地圖?
對于無人車來說,地圖的精度越高、信息越豐富,就越容易判斷路況,行駛也就越安全。高精度地圖的精確主要體現(xiàn)在兩個方面。
第一,絕對精度高。
普通導航電子地圖一般絕對精度在 5-10 米,只要起到輔助駕駛員的作用就足夠了,但對于無人車來說,精確度就是生命線,兩個車道間的距離也不過幾十厘米。因此,高精度地圖的絕對精度需要控制在 20 厘米以內(nèi),也就是一個車道標線的寬度,這樣才能保證不會發(fā)生側(cè)面碰撞。
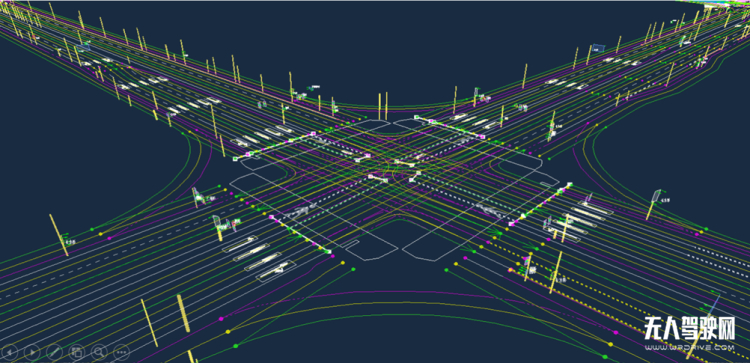
第二,路面屬性要素更豐富,更細致。
在傳統(tǒng)地圖中,道路經(jīng)常被抽象成寬度無差別的線,然而高精度地圖不僅要有準確的定位坐標,還需要采集包括車道邊界、交通標牌、護欄、路燈桿、龍門架在內(nèi)的 100 多種路面屬性要素,甚至每一條路路邊馬路牙的材質(zhì)和寬窄,都要精確記錄在地圖中。當無人車上路時,高精度地圖的每一個屬性都關(guān)乎自動駕駛的安全:哪些路段周邊有防護欄,哪些障礙物的材質(zhì)偏軟安全系數(shù)較高,都是行駛中做出判斷的重要依據(jù)。
除了更精確以外,高精度地圖的鮮度也更高。
自動駕駛車輛需要實時掌握車輛周邊設施的變化情況和道路的交通狀態(tài),因此,高精度地圖需要提供日更新、甚至小時級更新的高鮮度數(shù)據(jù)和以分鐘、秒為更新頻率的動態(tài)交通信息。四維圖新運用 TensorFlow 檢測分割原始數(shù)據(jù),大幅提高了地圖數(shù)據(jù)生產(chǎn)的自動化率,保證了地圖數(shù)據(jù)的鮮度。
用 TensorFlow 自動制圖
高精度地圖的底圖制作主要分為原始數(shù)據(jù)采集和地圖要素提取兩個步驟。
傳統(tǒng)地圖主要通過輕量級設備,采集車輛 GNSS 行駛軌跡數(shù)據(jù),以及周邊地物的 POI 點數(shù)據(jù),而高精度地圖需要更專業(yè)的采集車。四維圖新的數(shù)據(jù)采集車上集成了激光雷達、慣性導航系統(tǒng)(INS)、全景相機、GNSS、差分基站等多種測繪工具,以繪制詳細的車道級地面信息和道路周邊詳細的道路設施為主。
一種高精度地圖采集車
專業(yè)采集設備采集到的海量原始數(shù)據(jù)經(jīng)過自動化解算后,TensorFlow 擔綱的算法會自動從中提取出地圖要素。
在 AI 算法開發(fā)過程中,四維圖新使用 TensorFlow 訓練圖像(對象檢測、分割)以及點云識別算法,對點云自動進行要素分類。
確定有價值的要素點云后,算法會濾除對后續(xù)提取有干擾的噪點,自動裁切作業(yè)范圍外的無效點云。
濾除噪點后,算法通過點云分類結(jié)果和點云的強度值自動跟蹤提取車道標線、路面標志、交通標志、護欄、路牙、桿狀物、上方障礙物等路面、路側(cè)、路上的交通設施和對自動駕駛有影響的附著物。提取的矢量數(shù)據(jù)根據(jù)識別結(jié)果自動賦屬性值,和相鄰的其他要素組織邏輯關(guān)系,車道之間的位置關(guān)系進行準確的定位和和規(guī)劃,實現(xiàn)車道級別的規(guī)劃。
在算法訓練過程中,TensorFlow 支持大規(guī)模分布式模型訓練,可以充分發(fā)揮硬件資源的集群優(yōu)勢。更多的硬件意味著更大的批次,進一步也決定了更快的訓練效率和更好的算法效果。
四維圖新地圖研發(fā)工程師郭兆鐘告訴 PingWest品玩,使用 TensorFlow 后,同樣規(guī)模的訓練,訓練時間縮短了40%。“在相同訓練周期的情況下,算法模型的效果也有相當程度的提高。”郭兆鐘說。
在 TensorFlow 的幫助下,目前四維圖新已經(jīng)完成了全國高速,包括城市快速路的測繪工作,總地圖里程達到 30 萬公里以上。同時,四維圖新高精度地圖生產(chǎn)已經(jīng)達到 40% 自動化率,30% 半自動化率,這一數(shù)據(jù)領(lǐng)先全行業(yè)。






















