


在車輛行駛過程中,駕駛員會選擇最合理的車道進行行駛,而在無人駕駛場景中,車輛在自動駕駛時必須具備和駕駛員一樣的自主選擇最優車道的能力,才能在多車道的高速公路或者城市道路.上行駛,否則將無法上路。
用戶自主駕駛的過程中,可以根據經驗對自動導航的路線預估后可以加入用戶自己的判斷,因此可以允許有很長的響應時間,而無人駕駛是全自動,不允許有過長的響應時間,需要確保響應時間盡可能低。
在無人駕駛場景中,選擇最優車道會涉及到變換車道的變道行為,包括自由變道(DLC)和強制變道(MLC)兩種:DLC是為了改善行駛速度;MLC是由于路口等影響必須得離開本車道。現有的無人駕駛技術中,需要先判斷是否需要考慮MLC,在符合一定條件后再考慮DLC,以便通過這種判斷機制對駕駛員的駕駛行為進行仿真模擬。
然而,這種判斷機制的問題是:將DLC和MLC割裂的進行分析的判斷機制,與無人駕駛的場景,尤其是變道的選擇上存在較大差異。因此,基于該判斷機制的決策結果在實際應用中并不理想,無法實現精準的變道選擇,從而也無法確保響應時間盡可能低的要求。
為了解決這個問題,騰訊科技在18年3月29日申請了一項名為“一種車道選擇方法即目標車輛、計算機存儲介質”的發明專利(國際公布號:WO 2018/192352 A1),申請人為騰訊科技(深圳)有限公司。
首先我們需要明確自動駕駛和無人駕駛的區別,用戶自主駕駛的過程中,是半自動,對自動導航的路線預估后可以加入用戶自己的判斷,因此,可以允許有很長的響應時間;而無人駕駛是全自動,不允許有過長的響應時間,需要確保響應時間盡可能低。
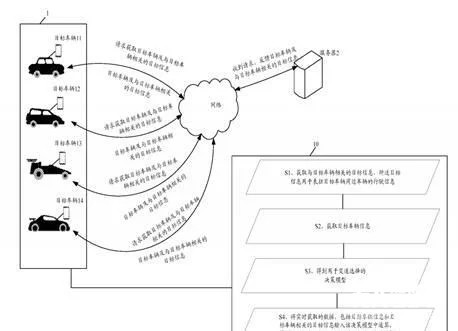
該專利發明的系統中,對于該問題的解決依賴于系統的處理邏輯,首先獲取與無人駕駛車輛相關的信息,這些信息用于表征無人駕駛車輛周邊車輛的行駛信息,其次要獲取無人駕駛車輛的信息,包括車身的信息以及周圍的環境信息,接著根據用于決策路口變道的第一模型和用于決策行駛速度的第二模型得到用于變道選擇的決策模型,最后再根據這些實時獲取的數據得到控制指令進行車道的選擇。
該系統用于檢測變道的具體過程需要依賴兩個決策模型,即根據用于決策路口變道的第一模型和用于決策行駛速度的第二模型,得到用于變道選擇的決策模型。
第一模型為MLC,用于評估當前車輛行駛到路口需要的時間t,是否大于變換車道所需要的時間,采用MLC,是對路口變道進行決策,比如當前由于路口等影響必須得離開本車道。
第二模型為DLC, DLC的決策分為車道選擇(LS)和確定變道的接納(GA)兩步。其中,在LS中,是根據車速、車道限速等綜合信息判定相鄰車道是否需要變道;而GA中,是根據相鄰車道前后車的距離來判斷,是否擁有總夠的變道空間。只有這2個條件同時滿足,才會做出變道決策。
無人車輛的周邊行駛信息由102確定,這些信息包括周邊車輛的地理位置信息以及周圍車輛相對于自身的距離,還有這些車輛的速度、所在車道信息,這些信息就需要安裝在無人駕駛車輛上的各種傳感器來獲取。
最終以上技術,利用決策模型做出是否需要變道的決策。以上就是騰訊科技發明的控制無人駕駛車輛自主選擇車道的專利,可以看到該技術中主要依賴于決策系統,利用無人駕駛車輛能夠采集到的各種信息以及決策系統的決策來完成車道的選擇,而車道的選擇對于無人駕駛汽車來說是至關重要的一個環節。






















