


麻省理工學(xué)院為自動駕駛汽車創(chuàng)造了一個新的系統(tǒng),也許有一天能幫助自動駕駛汽車與人類駕駛員一起安全運行。麻省理工學(xué)院的一個研究小組一直在探索,自動駕駛汽車是否可以編程,對其他駕駛者的社交個性進行分類,從而使自動駕駛汽車能夠更好地預(yù)測不同的汽車會做什么。
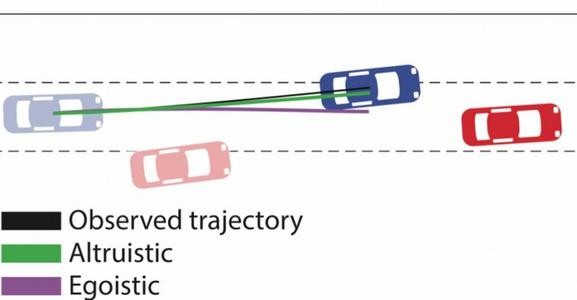
這將使自動駕駛汽車可以更安全地圍繞其他車輛行駛。該團隊發(fā)表了一篇論文,著眼于社會心理學(xué)工具的集成,以對涉及特定駕駛員自私或無私的駕駛行為進行分類。團隊使用了一種稱為“社會價值取向”(SVO)的東西,它表示某人的自私(利己主義)與利他或合作(親社會)的程度。系統(tǒng)估計駕駛員的SVO,為自動駕駛汽車創(chuàng)建實時駕駛軌跡。對算法進行了合并車道和無保護左轉(zhuǎn)的測試。該算法使研究小組能夠以25%的系數(shù)更好地預(yù)測其他汽車的可能行為。
在向左轉(zhuǎn)彎的模擬中,采用新算法的汽車,在駛近的汽車駕駛員更具自私性時會等待,而在另一輛汽車更具親和力時會轉(zhuǎn)彎。新算法雖然還不夠強大,無法在實際道路上使用,但可以通過不同方式幫助駕駛員。
該算法可用于在后視鏡中向駕駛員發(fā)出警告,警告處于盲點的汽車有一個咄咄逼人的駕駛員,允許駕駛員進行相應(yīng)的調(diào)整。該算法還可以讓自動駕駛汽車有一天在行為上變得更像人類。當(dāng)前自動駕駛汽車的一個問題是,它們都被編程假設(shè)所有司機的行為都是相同的。這使得自動駕駛汽車在四向停車場和其他十字路口的決策保守,這可能會激怒其他人類駕駛員。






















