

您現在的位置:首頁 > 惡劣天氣下,如何保證自動駕駛的可靠性?
惡劣天氣下,如何保證自動駕駛的可靠性?
統計數據顯示,雨雪等惡劣天氣下行車事故的發生率較正常天氣高出70%。
風沙、濃霧、雨雪等極端天氣,對路況條件、駕駛員視野和場景判斷等帶來極大干擾。無論是初出茅廬的新手司機,亦或是駕齡豐富的老司機,雨雪天行車均無異于一場噩夢。

而對于“模仿”有人駕駛的自動駕駛汽車,惡劣天氣條件對環境感知系統的影響則更為嚴重。是否具備惡劣天氣條件下的正常行駛能力,是檢驗自動駕駛汽車能否上路的終極“試金石”。
天氣對感知系統的影響
為了確保自動駕駛車輛在不同場景下均可以做出正確判斷,需要對周圍環境信息進行實時動態獲取和識別,這些信息包括但不限于自車的狀態、交通流信息、道路狀況、交通標志等,以滿足車輛決策系統的需求。
換言之,環境感知起著類似人類駕駛員“眼睛”、“耳朵”的作用,是實現自動駕駛的前提條件。
目前,環境感知技術有兩種技術路線,一種是以攝像機為主導的多傳感器融合方案,另一種是以激光雷達為主導,其他傳感器為輔助的技術方案,這兩種方案常用的傳感器種類包括但不限于激光雷達、毫米波雷達、超聲波雷達、攝像頭等。
不同傳感器在面對不同天氣時,所受到的影響是不同的,目前暫時沒有任何一種傳感器可以完美應對任何天氣。
激光雷達
激光雷達+高精地圖,是目前自動駕駛一種主流傳感器組合方案。
激光雷達精度高、穿透力強,可以實時掃描周圍環境建立三維模型,擁有很高的可靠性和精確性,但對惡劣天氣的適應性則稍微差一些。
雨天對激光雷達的影響相對較小,除暴雨等極端降雨條件下,激光雷達基本不會受到任何影響。
雪天和風沙天則會對激光雷達造成明顯影響。與降雨不同,雪由固體物和雪花組成,很容易堆積形成障礙物(風沙天也容易形成堆積物),從而影響激光雷達的掃描距離,或者導致激光雷達的錯誤探測。
毫米波雷達
毫米波雷達探測距離遠,精度雖沒有激光雷達高,但在眾多傳感器類別中仍處于較高水準,主要作為測距和測速傳感器而存在。
毫米波雷達對霧、煙、灰塵的穿透能力極強,在惡劣天氣條件下,整體表現更好。但毫米波雷達也并非全無缺點,其在有雨有霧或大雨的天氣下表現欠佳,性能會出現大幅下降,且毫米波雷達也存在對行人識別不足的問題。
超聲波雷達
超聲波雷達具有頻率高、波長短、繞射現象小、方向性好、能夠成為射線而定向傳播等優點,但探測距離很短,因此常用于短距離測量,如泊車場景。
超聲波雷達受天氣情況影響大,不同溫度情況下,測量的距離也不盡相同,在測量較遠距離目標時,其回波信號會比較弱,無法精確描述障礙物的位置。
攝像頭
攝像頭是受天氣影響最為嚴重的一種傳感器。一滴雨、一粒沙子、一片雪花都會對攝像頭造成遮擋,無法正確感知周圍環境。
此外,攝像頭也是少有的在正常天氣下,也會出現被干擾的傳感器。晴天陽光的照射、玻璃的反射都會使攝像頭的可見度降低到幾乎為零,光引起的表面反射也會出現混淆視野,從而造成誤判的情況。
如何保證惡劣天氣下的可靠性
自動駕駛一項重要潛在應用優勢就是提高行車安全性。
理想狀態下,通過應用車聯網等技術,自動駕駛汽車可以有效感知路況信息,自動控制與周圍車輛間距,交通事故發生率會維持在一個非常低的水準。
為了達到理想狀態下的自動駕駛,當前仍需解決各種技術問題,自然也包括惡劣天氣下的行車安全性。
目前,提升惡劣天氣下自動駕駛汽車行車安全性的方式主要有多傳感器融合、惡劣天氣訓練數據集、模擬仿真等多種方式。
多傳感器融合
單一傳感器在面對惡劣天氣時會出現各種各樣的問題,但通過多傳感器融合的方式,可以做到優勢互補,揚長避短。
此外,多傳感器融合也可以在某些狀態下,如某一種傳感器出現故障的環境下,額外提供一定安全冗余度。這種錯誤或故障可能是由天氣原因或是人為原因(例如,對攝像頭或雷達的電子干擾或人為干擾)導致。
訓練數據集
感知算法的訓練與調優離不開各種數據集。
為了讓自動駕駛汽車能在各種環境下均能準確識別路況信息,并做出正確判斷,就需要為算法投喂種類多樣的路況數據。
目前,用于感知算法訓練的數據集多以良好天氣場景為主,如晴天或陰天。惡劣天氣場景下的數據集不僅總量少,場景覆蓋度也同樣不足。出現這種狀況的原因一方面是因為惡劣天氣出現的概率相對較小,實現自動駕駛是一個循序漸進的過程,優先解決大場景,后續逐漸解決小場景是一種現實且行之有效的方案。
另一方面原因則是惡劣天氣數據的采集離不開有人駕駛采集車。惡劣天氣下,有人采集車上路行駛同樣會面臨較高的行車安全風險,采集存在一定難度。
事實上,除了采集存在難度以外,惡劣天氣數據集的標注處理同樣也是一個難題。不同于良好天氣下采集的數據,惡劣天氣下采集得到的數據集往往存在圖像模糊、無法準確分辨物體等問題,處理效率和數據質量均較難以滿足實際需求。
曼孚科技深諳惡劣天氣數據集的標注處理之道。無論是雨天、雪天還是風沙天等,曼孚科技均積累了較為豐厚的經驗,MindFlow SEED數據服務平臺也針對惡劣天氣場景做出優化,AI預識別算法加持下,模糊圖像的識別處理準確率得到有效提升。
無論是數據處理效率亦或是數據產出質量,均可以滿足大規模惡劣天氣感知算法的訓練需求。
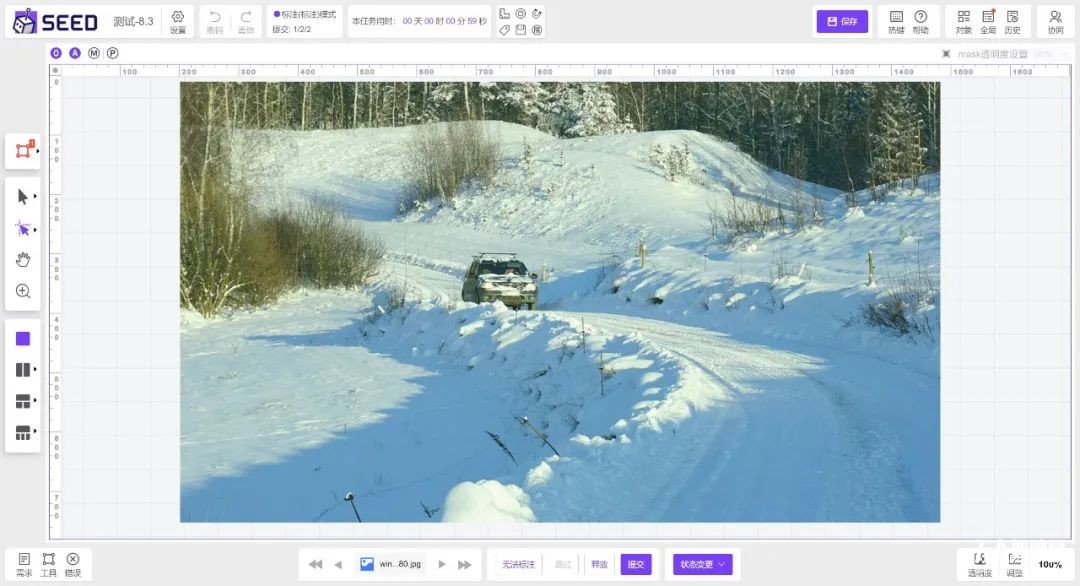
數據來源:MindFlow SEED數據服務平臺
仿真與模擬
風沙、雨雪等惡劣天氣受季節、地域等因素影響較大,熱帶地區無法采集到降雪環境相關數據集,水草豐茂地區也很難出現風沙天氣。
然而哪怕是在合適的區域,惡劣天氣的出現也是一件小概率事件。為了采集得到足夠多的數據集,需要付出的時間成本與人力成本均十分高昂。
另外,正如上文所述,惡劣天氣對采集車的行車安全也是一項考驗,有人駕駛的數據采集車在惡劣天氣下并不能做到百分百安全。
仿真與模擬平臺的出現則很好地解決了此類問題。實驗室可以代替實際環境做測試。通過在封閉環境下模擬雨雪、霧霾、風沙等天氣,既與真實環境相差無幾,又高度可控,對人員或設施的安全危害可以降低到一個很低的水平。
除以上三種方式以外,V2X、路面檢測、先驗地圖等也是解決惡劣天氣自動駕駛安全行駛的有效方式。伴隨著眾多解決方案的應用,自動駕駛汽車在惡劣天氣下的表現愈發穩健,全場景、完全自動駕駛未來可期。